标签:
闭环控制是根据控制对象输出反馈来进行校正的控制方式,它是在测量出实际与计划发生偏差时,按定额或标准来进行纠正的。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上。提到闭环控制算法,不得不提PID,它是闭环控制算法中最简单的一种。PID是比例 (Proportion) 积分 ,(Integral) 微分 ,(Differential coefficient) 的缩写,分别代表了三种控制算法。通过这三个算法的组合可有效地纠正被控制对象的偏差,从而使其达到一个稳定的状态。如下图所示为PID的流程。
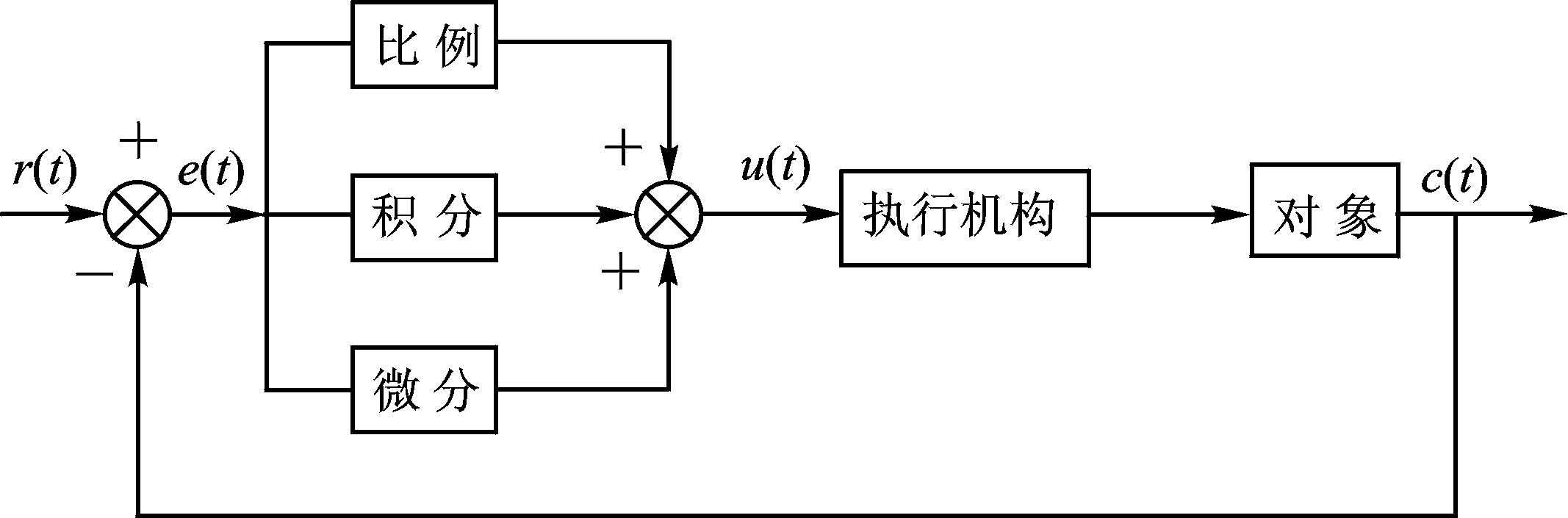
其中r(t)表示给定输入值,c(t)表示实际输出值,e(t)表示信号偏差量,u(t)表示修正量。
1、比例(P)、积分(I)、微分(D)控制算法各有作用:
1)、比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;
2)、积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;
3)、微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动
态性能。但是分对噪声干扰有放大作用,加强微分对系统抗干扰不利。
积分和微分都不能单独起作用,必须与比例控制配合。
参考资料:
[2]. PID控制算法
标签:
原文地址:http://www.cnblogs.com/cv-pr/p/4785195.html