标签:
实验二、作业调度模拟程序实验
专业 13物联网 姓名 张欣怡 学号 201306104135
实验目的
用高级语言完成一个进程调度程序,以加深对进程的概念及进程调度算法的理解。
实验要求
设计一个有 N(N不小于5)个进程并发执行的进程调度模拟程序。
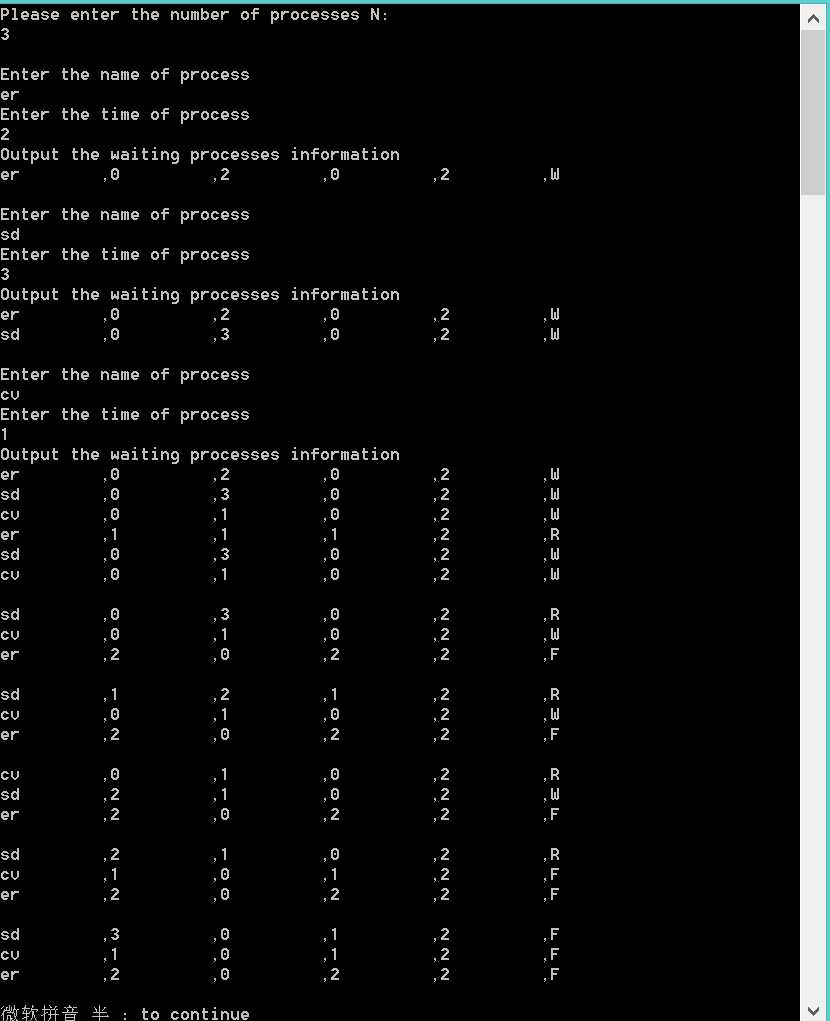
进程调度算法:“时间片轮转法”调度算法对N个进程进行调度。
完成两个算法(简单时间片轮转法、多级反馈队列调度算法)的设计、编码和调试工作,完成实验报告。
1) 每个进程有一个进程控制块(PCB)表示。进程控制块包含如下信息:进程名、优先级、到达时间、需要运行时间、已用CPU时间、进程状态等等。
2) 每个进程的状态可以是就绪 r(ready)、运行R(Running)、或完成F(Finished)三种状态之一。
3) 就绪进程获得 CPU后都只能运行一个时间片。用已占用CPU时间加1来表示。
4) 如果运行一个时间片后,进程的已占用 CPU时间已达到所需要的运行时间,则撤消该进程,如果运行一个时间片后进程的已占用CPU时间还未达所需要的运行时间,也就是进程还需要继续运行,应把它插入就绪队列等待下一次调度。
5) 每进行一次调度,程序都打印一次运行进程、就绪队列中各个进程的 PCB,以便进行检查。
6) 重复以上过程,直到所要进程都完成为止。
“轮转法”有简单轮转法、多级反馈队列调度算法。
(1). 简单轮转法的基本思想是:
所有就绪进程按 FCFS排成一个队列,总是把处理机分配给队首的进程,各进程占用CPU的时间片长度相同。如果运行进程用完它的时间片后还未完成,就把它送回到就绪队列的末尾,把处理机重新分配给队首的进程。直至所有的进程运行完毕。
(2). 多级反馈队列调度算法的基本思想是:
将就绪队列分为N级(N=3~5),每个就绪队列优先数不同并且分配给不同的时间片:队列级别越高,优先数越低,时间片越长;级别越小,优先数越高,时间片越短。
系统从第一级调度,当第一级为空时,系统转向第二级队列,.....当处于运行态的进程用完一个时间片,若未完成则放弃CPU,进入下一级队列。
当进程第一次就绪时,进入第一级队列。
#include <stdio.h> #include <stdlib.h> #include <string.h> #include <ctype.h> /*进程控制块数据结构*/ typedef struct node { char name[10];/*进程名*/ int prio; /*进程优先级*/ int round; /*进程分配的时间片*/ int cputime; /*进程消耗的CUP时间*/ int needtime; /*进程需要的CUP时间*/ int count; /*进程运行时间*/ char state; /*进程的状态:‘R‘:运行,‘W‘:等待,‘F‘:结束*/ struct node *next;/*指向下一个进程的指针*/ }PCB; PCB *finish,*ready,*tail,*run;/*指向三个队列的队首的指针,tail为就绪队列的队尾指针*/ int N;/*定义进程的数目*/ /* 函数功能: 将进程就绪队列中第一个放进就绪队列 函数原型: void firstin(void) 函数参数: void 函数返回值:void */ void firstin(void) { if(ready!=NULL) { run=ready; ready=ready->next; run->state=‘R‘; run->next=NULL; } else { run=NULL; } } /* 函数功能:输出单个进程信息的函数 函数原型:void prt2(char a,PCB *p) 函数参数:char a :a==‘p‘为优先级,==‘r‘为时间片轮转 PCB *p 为指向待输出的进程控制块的指针 函数返回值:void */ void prt2(char a,PCB *p) { printf("%-10s,%-10d,%-10d,%-10d,%-10d,%-5c\n",p->name,p->cputime,p->needtime,p->count,p->round,p->state); } /* 函数功能:输出所有进程信息的函数 函数原型:void prt(char algo) 函数参数:char a :a==‘p‘为优先级,==‘r‘为时间片轮转 函数返回值:void */ void prt(char algo) { PCB *p; if(run!=NULL) { prt2(algo,run); } p=ready; while(p!=NULL) { prt2(algo,p); p=p->next; } p=finish; while(p!=NULL) { prt2(algo,p); p=p->next; } getchar(); } /* 函数功能:时间片轮转算法调度将进程插入到就绪队列算法 函数原型:void insert2(PCB *q) 函数参数:PCB *q 待插入的队列进程控制块 函数返回值:void */ void insert2(PCB *q) { tail->next=q; tail=q; q->next=NULL; } /* 函数功能:采用时间片轮转法进程调度法时,进程初始化函数 函数原型:void rcreate_task(char algo) 函数参数:char algo: R 函数返回值:void */ void rcreate_task(char algo) { PCB *p; int i,time; char na[10]; ready=NULL; finish=NULL; run=NULL; for(i=0;i<N;i++) { p=(PCB*)malloc(sizeof(PCB)); printf("\nEnter the name of process\n"); scanf("%s",na); printf("Enter the time of process\n"); scanf("%d",&time); strcpy(p->name,na); p->cputime=0; p->needtime=time; p->count=0; p->state=‘W‘; p->round=2; if(ready!=NULL) { insert2(p); } else { p->next=ready; ready=p; tail=p; } printf("Output the waiting processes information\n"); prt(algo); } run=ready; ready=ready->next; run->state=‘R‘; } /* 函数功能:采用时间片轮转法进程调度法时,进程调度函数 函数原型:void roundrun(char algo) 函数参数:char algo: R 函数返回值:void */ void roundrun(char algo) { while(run!=NULL) { run->cputime=run->cputime+1; run->needtime=run->needtime-1; run->count=run->count+1; if(run->needtime==0) { run->next=finish; finish=run; run->state=‘F‘; run=NULL; if(ready!=NULL) { firstin(); } } else { if(run->count==run->round) { run->count=0; if(ready!=NULL) { run->state=‘W‘; insert2(run); firstin(); } } } prt(algo); } } /*main 函数*/ void main() { char algo=‘r‘; printf("Please enter the number of processes N:\n"); scanf("%d",&N); rcreate_task(algo); roundrun(algo); }
总结:时间片算法程序想法是参考网上的,看了网上的程序也不是很能理解。多级反馈调度算法还是不懂。
标签:
原文地址:http://www.cnblogs.com/z1230/p/5014204.html