标签:
在一张地图中,绘制从起点移动到终点的最优路径,地图中会有障碍物,必须绕开障碍物。
(如果有路径)采用“结点与结点的父节点”的关系从最终结点回溯到起点,得到路径。
A星算法的代价计算使用了被称作是启发式的代价函数。
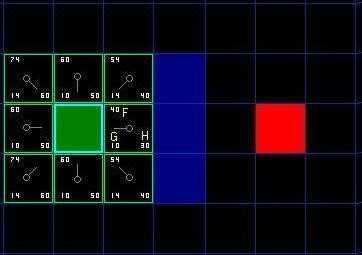
先说明一下各符号意义:G表示的是 ** 从起点到当前结点的实际路径代价 ** (为啥叫实际?就是已经走过了,边走边将代价计算好了);H表示 ** 当前结点到达最终结点的估计代价 ** (为啥叫估计?就是还没走过,不知道前面有没障碍、路通不通,所以只能用估计);F表示 ** 当前结点所在路径从起点到最终点预估的总路径代价 ** 。
G的计算方式:计算方式有挺多种的,这里我们就用这种吧,假设每个结点代表一个正方形,横竖移动距离:斜移动距离=1:1.4(根号2),我们取个整数10和14吧,也就是说当前结点G值=父节点的G+(10或14)。
H的计算方式:估价计算也有很多种方式,我们这里使用“曼哈顿”法,H=|当前结点x值-最终结点x值|+|当前结点y值-最终结点y值|(”||”表示绝对值)。
如下图(图不是自己做的,从网上借来的,自己画的话~…惨不忍睹!)
在A星算法中,需要使用两个辅助表来记录结点。
一个用于 ** 记录可被访问的结点 ** ,成为Open表;一个是 ** 记录已访问过的结点 ** ,称为Close表。
** 这两个表决定了算法的结束:条件是最终结点在Close表中(找到路径)或Open表为空(找不到了路径)。 **
上面的理解的话,现在就来移动当前的节点,寻找路径。
每次从Open表中取出F值最小的结点出来(** 这里我们使用优先队列来处理比较好 ),作为当前结点;然后将当前结点的所有邻结点按照 邻结点规则 ** 加入到Open表中;最后将当前结点放入Close表中,这里就是每次循环的执行内容。
** 邻结点规则 :
(1) 当邻结点不在地图中,不加入Open表;
(2) 当邻结点是障碍物,不加入Open表;
(3) 当邻结点在Close表中,不加入Open表;
(4) 当邻结点不在Open中,加入Open表, 设该邻结点的父节点为当前结点 ;
(5) 当邻结点在Open表中,我们需要做个比较:如果邻结点的G值>当前结点的G值+当前结点到这个邻结点的代价,那么修改该邻结点的父节点为当前的结点(因为在Open表中的结点除了起点,都会有父节点),修改G值=当前结点的G值+当前结点到这个邻结点的代价 **
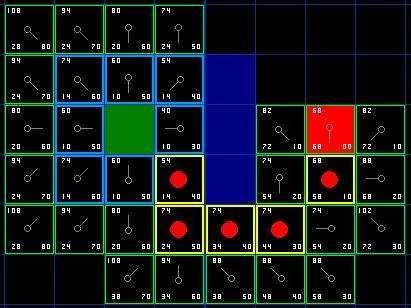
蓝色框框表示在Close表中,绿色的框框表示在Open表中
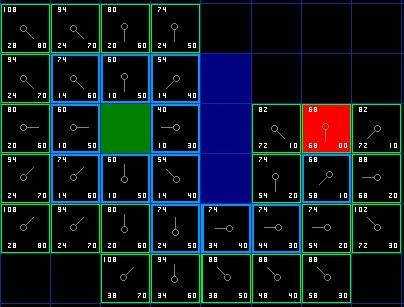
最后回溯得到路径
(1) 代表地图二值二维数组(0表示可通路,1表示路障)
int[][] maps = {{ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 },{ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 },{ 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0, 0 },{ 0, 0, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0 },{ 0, 0, 0, 1, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0 },{ 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0 },{ 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0 }};
(2) 按照二维数组的特点,坐标原点在左上角,所以y是高,x是宽,y向下递增,x向右递增,我们将x和y封装成一个类,好传参,重写equals方法比较坐标(x,y)是不是同一个。
public class Coord{public int x;public int y;public Coord(int x, int y){this.x = x;this.y = y;}@Overridepublic boolean equals(Object obj){if (obj == null) return false;if (obj instanceof Coord){Coord c = (Coord) obj;return x == c.x && y == c.y;}return false;}}
(3) 封装路径结点类,字段包括:坐标、G值、F值、父结点,实现Comparable接口,方便优先队列排序。
public class Node implements Comparable<Node>{public Coord coord; // 坐标public Node parent; // 父结点public int G; // G:是个准确的值,是起点到当前结点的代价public int H; // H:是个估值,当前结点到目的结点的估计代价public Node(int x, int y){this.coord = new Coord(x, y);}public Node(Coord coord, Node parent, int g, int h){this.coord = coord;this.parent = parent;G = g;H = h;}@Overridepublic int compareTo(Node o){if (o == null) return -1;if (G + H > o.G + o.H)return 1;else if (G + H < o.G + o.H) return -1;return 0;}}
(4) 最后一个数据结构是A星算法输入的所有数据,封装在一起,传参方便。:grin:
public class MapInfo{public int[][] maps; // 二维数组的地图public int width; // 地图的宽public int hight; // 地图的高public Node start; // 起始结点public Node end; // 最终结点public MapInfo(int[][] maps, int width, int hight, Node start, Node end){this.maps = maps;this.width = width;this.hight = hight;this.start = start;this.end = end;}}
(1) 在算法里需要定义几个常量来确定:二维数组中哪个值表示障碍物、二维数组中绘制路径的代表值、计算G值需要的横纵移动代价和斜移动代价。
public final static int BAR = 1; // 障碍值public final static int PATH = 2; // 路径public final static int DIRECT_VALUE = 10; // 横竖移动代价public final static int OBLIQUE_VALUE = 14; // 斜移动代价
(2) 定义两个辅助表:Open表和Close表。Open表的使用是需要取最小值,在这里我们使用Java工具包中的优先队列PriorityQueue,Close只是用来保存结点,没其他特殊用途,就用ArrayList。
Queue<Node> openList = new PriorityQueue<Node>(); // 优先队列(升序)List<Node> closeList = new ArrayList<Node>();
(3) 定义几个布尔判断方法:最终结点的判断、结点能否加入open表的判断、结点是否在Close表中的判断。
/*** 判断结点是否是最终结点*/private boolean isEndNode(Coord end,Coord coord){return coord != null && end.equals(coord);}/*** 判断结点能否放入Open列表*/private boolean canAddNodeToOpen(MapInfo mapInfo,int x, int y){// 是否在地图中if (x < 0 || x >= mapInfo.width || y < 0 || y >= mapInfo.hight) return false;// 判断是否是不可通过的结点if (mapInfo.maps[y][x] == BAR) return false;// 判断结点是否存在close表if (isCoordInClose(x, y)) return false;return true;}/*** 判断坐标是否在close表中*/private boolean isCoordInClose(Coord coord){return coord!=null&&isCoordInClose(coord.x, coord.y);}/*** 判断坐标是否在close表中*/private boolean isCoordInClose(int x, int y){if (closeList.isEmpty()) return false;for (Node node : closeList){if (node.coord.x == x && node.coord.y == y){return true;}}return false;}
(4) 计算H值,“曼哈顿” 法,坐标分别取差值相加
private int calcH(Coord end,Coord coord){return Math.abs(end.x - coord.x) + Math.abs(end.y - coord.y);}
(5) 从Open列表中查找结点
private Node findNodeInOpen(Coord coord){if (coord == null || openList.isEmpty()) return null;for (Node node : openList){if (node.coord.equals(coord)){return node;}}return null;}
(6) 添加邻结点到Open表
/*** 添加所有邻结点到open表*/private void addNeighborNodeInOpen(MapInfo mapInfo,Node current){int x = current.coord.x;int y = current.coord.y;// 左addNeighborNodeInOpen(mapInfo,current, x - 1, y, DIRECT_VALUE);// 上addNeighborNodeInOpen(mapInfo,current, x, y - 1, DIRECT_VALUE);// 右addNeighborNodeInOpen(mapInfo,current, x + 1, y, DIRECT_VALUE);// 下addNeighborNodeInOpen(mapInfo,current, x, y + 1, DIRECT_VALUE);// 左上addNeighborNodeInOpen(mapInfo,current, x - 1, y - 1, OBLIQUE_VALUE);// 右上addNeighborNodeInOpen(mapInfo,current, x + 1, y - 1, OBLIQUE_VALUE);// 右下addNeighborNodeInOpen(mapInfo,current, x + 1, y + 1, OBLIQUE_VALUE);// 左下addNeighborNodeInOpen(mapInfo,current, x - 1, y + 1, OBLIQUE_VALUE);}/*** 添加一个邻结点到open表*/private void addNeighborNodeInOpen(MapInfo mapInfo,Node current, int x, int y, int value){if (canAddNodeToOpen(mapInfo,x, y)){Node end=mapInfo.end;Coord coord = new Coord(x, y);int G = current.G + value; // 计算邻结点的G值Node child = findNodeInOpen(coord);if (child == null){int H=calcH(end.coord,coord); // 计算H值if(isEndNode(end.coord,coord)){child=end;child.parent=current;child.G=G;child.H=H;}else{child = new Node(coord, current, G, H);}openList.add(child);}else if (child.G > G){child.G = G;child.parent = current;// 重新调整堆openList.add(child);}}}
(7) 回溯法绘制路径
private void drawPath(int[][] maps, Node end){if(end==null||maps==null) return;System.out.println("总代价:" + end.G);while (end != null){Coord c = end.coord;maps[c.y][c.x] = PATH;end = end.parent;}}
(8) 开始算法,循环移动结点寻找路径,设定循环结束条件,Open表为空或者最终结点在Close表
public void start(MapInfo mapInfo){if(mapInfo==null) return;// cleanopenList.clear();closeList.clear();// 开始搜索openList.add(mapInfo.start);moveNodes(mapInfo);}/*** 移动当前结点*/private void moveNodes(MapInfo mapInfo){while (!openList.isEmpty()){if (isCoordInClose(mapInfo.end.coord)){drawPath(mapInfo.maps, mapInfo.end);break;}Node current = openList.poll();closeList.add(current);addNeighborNodeInOpen(mapInfo,current);}}
标签:
原文地址:http://www.cnblogs.com/kesar/p/5a66dfbcfc8c02cab1cef5a92c0b2e7f.html