标签:
》原理曾经的博客中已经有对meanshift原理的解释,这里就不啰嗦了。国外的资料看这:http://people.csail.mit.edu/sparis/#cvpr07
》源代码
核心代码(參考网络)
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
|
//============================Meanshift==============================//void MyClustering::MeanShiftImg(IplImage
* src , IplImage * dst , float r
, int Nmin
,int Ncon
){ int i
, j , p ,k=0,run_meanshift_slec_number=0; int pNmin; //mean
shift产生的特征的搜索框内的特征数 IplImage
* temp , * gray; //转换到Luv空间的图像 CvMat
* distance , * result , *mask; // CvMat
* temp_mat ,*temp_mat_sub ,*temp_mat_sub2 ,* final_class_mat; //Luv空间的图像到矩阵,图像矩阵与随机选择点之差。 CvMat
* cn ,* cn1 , * cn2 , * cn3; double /*covar_img[3]
,*/ avg_img[3]; //图像的协方差主对角线上的元素和,各个通道的均值 double r1; //搜索半径 int temp_number; meanshiftpoint
meanpoint[25]; //存储随机产生的25点 CvScalar
cvscalar1,cvscalar2; int order[25]; Feature
feature[100]; //特征 double shiftor; CvMemStorage
* storage=NULL; CvSeq
* seq=0 , * temp_seq=0 , *prev_seq;//---------------------------------------------RGB
to Luv空间,初始化---------------------------------------------- temp
= cvCreateImage(cvSize(src->width,src->height),IPL_DEPTH_8U, src->nChannels); gray
= cvCreateImage(cvSize(src->width,src->height),IPL_DEPTH_8U, 1); temp_mat
= cvCreateMat(src->height,src->width,CV_8UC3); final_class_mat
= cvCreateMat(src->height,src->width,CV_8UC3); mask
= cvCloneMat(temp_mat); temp_mat_sub
= cvCreateMat(src->height,src->width,CV_32FC3); temp_mat_sub2
= cvCreateMat(src->height,src->width,CV_32FC3); cvZero(temp); cvCvtColor(src,temp,CV_RGB2Luv); //RGB
to Luv空间 distance
= cvCreateMat(src->height,src->width,CV_32FC1); result
= cvCreateMat(src->height,src->width,CV_8UC1); cvConvert(temp,temp_mat); //IplImage
to Mat cn
= cvCreateMat(src->height,src->width,CV_32FC1); cn1
= cvCloneMat(cn); cn2
= cvCloneMat(cn); cn3
= cvCloneMat(cn); storage
= cvCreateMemStorage(0);//-------------------------------------------计算搜索窗体半径
r -------------------------------------------- if(r!=NULL) r1=r; else { cvscalar1
= cvSum(temp_mat); avg_img[0]
= cvscalar1.val[0]/(src->width * src->height); avg_img[1]
= cvscalar1.val[1]/(src->width * src->height); avg_img[2]
= cvscalar1.val[2]/(src->width * src->height); cvscalar1
= cvScalar(avg_img[0],avg_img[1],avg_img[2],NULL); cvScale(temp_mat,temp_mat_sub,1.0,0.0); cvSubS(temp_mat_sub
, cvscalar1 , temp_mat_sub ,NULL); cvMul(temp_mat_sub
, temp_mat_sub , temp_mat_sub2); cvscalar1
= cvSum(temp_mat_sub2); r1
= 0.4*cvSqrt( (cvscalar1.val[0] + cvscalar1.val[1] + cvscalar1.val[2])/(src->width * src->height));; } //初始化随机数生成种子 srand((unsigned)time(NULL)); //--------------------循环,使用meanshift进行特征空间分析。终止条件是Nmin-------------------------------------- do {//--------------------------------------------初始化搜索窗体位置------------------------------------------- run_meanshift_slec_number++; cvSet(distance,cvScalar(r1*r1,NULL,NULL,NULL),NULL); for(
i = 0 ; i < 25 ; i++) { meanpoint[i].pt.x
= rand()%src->width; meanpoint[i].pt.y
= rand()%src->height; } cvScale(temp_mat,temp_mat_sub,1.0,0.0); for(
i = 0 ; i < 25 ; i++) { /*cvSubS(temp_mat_sub
,cvScalar(cvGetReal3D(temp_mat,meanpoint[i].pt.x,meanpoint[i].pt.y,0), cvGetReal3D(temp_mat,meanpoint[i].pt.x,meanpoint[i].pt.y,1), cvGetReal3D(temp_mat,meanpoint[i].pt.x,meanpoint[i].pt.y,2), NULL),temp_mat_sub,NULL);*/ cvSplit(temp_mat_sub,cn,cn1,cn2,NULL); cvSubS(temp_mat_sub,cvScalar(cvmGet(cn,meanpoint[i].pt.y,meanpoint[i].pt.x), cvmGet(cn1,meanpoint[i].pt.y,meanpoint[i].pt.x), cvmGet(cn2,meanpoint[i].pt.y,meanpoint[i].pt.x),NULL),temp_mat_sub,NULL); cvMul(temp_mat_sub,temp_mat_sub,temp_mat_sub2,1); cvSplit(temp_mat_sub2,cn,cn1,cn2,NULL); cvAdd(cn,cn1,cn3,NULL); cvAdd(cn2,cn3,cn3,NULL); //cn3中存放着,当前随机点与空间中其他点距离的平方。 cvCmp(cn3,distance,result,CV_CMP_LE); //距离小于搜索半径则result对应位为1 cvAndS(result,cvScalar(1,NULL,NULL,NULL),result,NULL); cvscalar1
= cvSum(result); meanpoint[i].con_f_number
= (int)cvscalar1.val[0]; } for(i
= 0 ; i < 25 ; i++) { order[i]=i; } for(i
= 0 ; i < 25 ; i++) for(j
= 0 ; j < 25-i-1; j++) { if(meanpoint[order[j]].con_f_number
< meanpoint[order[j+1]].con_f_number) { temp_number=order[j]; order[j]=order[j+1]; order[j+1]=temp_number; } }//--------------------------------------------meanshift算法------------------------------------------------ double temp_mean[3]; for(
i = 0 ; i < 25 ; i++) { cvScale(temp_mat,temp_mat_sub,1.0,0.0); cvSplit(temp_mat_sub,cn,cn1,cn2,NULL); temp_mean[0]
= cvmGet(cn , meanpoint[order[i]].pt.y , meanpoint[order[i]].pt.x); temp_mean[1]
= cvmGet(cn1 , meanpoint[order[j]].pt.y , meanpoint[order[i]].pt.x); temp_mean[2]
= cvmGet(cn2 , meanpoint[order[j]].pt.y , meanpoint[order[i]].pt.x); //meanshift过程 do { //计算出在搜索窗体内的特征点,而且生成相应的模板,即相应的点置一的矩阵表示相应的点在搜索框内 cvScale(temp_mat,temp_mat_sub,1.0,0.0); cvSubS(temp_mat_sub,cvScalar(temp_mean[0],temp_mean[1],temp_mean[2],NULL),temp_mat_sub,NULL); cvMul(temp_mat_sub,temp_mat_sub,temp_mat_sub2,1); cvSplit(temp_mat_sub2
, cn , cn1 , cn2 , NULL ); cvAdd(cn,cn1,cn3,NULL); cvAdd(cn2,cn3,cn3,NULL); //cn3中存放着。当前随机点与空间中其他点距离的平方。 cvCmp(cn3,distance,result,CV_CMP_LE); //距离小于搜索半径则result对应位为0XFF //计算shiftor cvCopy(temp_mat
, final_class_mat ,NULL); // cvMerge(result
, result ,result ,NULL,mask); cvAnd(final_class_mat
, mask ,final_class_mat ,NULL); //与mask(3通道,0XFF)做与操作,把搜索半径外的点置零 cvScale(final_class_mat,temp_mat_sub,1.0,0.0); //搜索半径内的点从8U转换成32F cvAndS(result,cvScalar(1,NULL,NULL,NULL),result,NULL); //对应位set
1 cvscalar1
= cvSum(result); //reslut
作为 模板 ,返回搜索窗体内的特征数 cvSubS(temp_mat_sub,cvScalar(temp_mean[0],temp_mean[1],temp_mean[2],NULL),temp_mat_sub,result); cvscalar2
= cvSum(temp_mat_sub); cvscalar2.val[0]
= cvscalar2.val[0]/cvscalar1.val[0] ; cvscalar2.val[1]
= cvscalar2.val[1]/cvscalar1.val[0] ; cvscalar2.val[2]
= cvscalar2.val[2]/cvscalar1.val[0] ; shiftor
= cvSqrt(pow(cvscalar2.val[0],
2) + pow(cvscalar2.val[1],
2) + pow(cvscalar2.val[2],
2)); temp_mean[0]=temp_mean[0]+cvscalar2.val[0]; temp_mean[1]=temp_mean[1]+cvscalar2.val[1]; temp_mean[2]=temp_mean[2]+cvscalar2.val[2]; /*cvCopy(temp_mat
, final_class_mat ,NULL); // cvMerge(result
, result ,result ,NULL,mask); cvAnd(final_class_mat
, mask ,final_class_mat ,NULL); //与result做与操作,把搜索半径外的点置零 cvScale(final_class_mat,temp_mat_sub,1.0,0.0);
//搜索半径内的点从8U转换成32F cvSplit(temp_mat_sub,cn,cn1,cn2,NULL); cvSubS(cn
, cvScalar(temp_mean[0],NULL,NULL,NULL),cn,result); cvSubS(cn1,
cvScalar(temp_mean[1],NULL,NULL,NULL),cn1,result); cvSubS(cn2,
cvScalar(temp_mean[2],NULL,NULL,NULL),cn2,result); cvMerge(cn,cn1,cn2,NULL,temp_mat_sub); cvscalar2
= cvSum(temp_mat_sub); shiftor
= cvSqrt(pow(cvscalar2.val[0] , 2) + pow(cvscalar2.val[1] , 2) + pow(cvscalar2.val[2] , 2)); temp_mean[0]=temp_mean[0]+cvscalar2.val[0]; temp_mean[1]=temp_mean[1]+cvscalar2.val[1]; temp_mean[2]=temp_mean[2]+cvscalar2.val[2];*/ } while(shiftor>0.1); //meanshift算法过程//--------------------------------------------去除不重要特征----------------------------------------------- if(k==0) { feature[k].pt.x
= temp_mean[0]; feature[k].pt.y
= temp_mean[1]; feature[k].pt.z
= temp_mean[2]; feature[k].number=
(int)cvscalar1.val[0]; //由于小于等于的情况成立时。result相应位置是0XFF,不成立时相应位置为0 pNmin
= (int)cvscalar1.val[0]; //此特征搜索窗体内,特征空间的向量个数 feature[k].result=cvCreateMat(src->height,src->width,CV_8UC1); cvAndS(result,cvScalar(1,NULL,NULL,NULL),result,NULL); cvCopy(result,feature[k].result,NULL); k++; } else { int flag
= 0; for(j
= 0 ; j < k ; j++) { if(pow(temp_mean[0]-feature[j].pt.x
, 2) + pow(temp_mean[1]-feature[j].pt.y
,2) + pow(temp_mean[2]-feature[j].pt.z,
2) <
r1*r1) { flag
= 1; break; } } if(flag==0) { feature[k].pt.x
= temp_mean[0]; feature[k].pt.y
= temp_mean[1]; feature[k].pt.z
= temp_mean[2]; feature[k].number=(int)cvscalar1.val[0]; pNmin
= (int)cvscalar1.val[0]; //此特征搜索窗体内,特征空间的向量个数 feature[k].result=cvCreateMat(src->height,src->width,CV_8UC1); cvCopy(result,feature[k].result,NULL); k++; //if(pNmin
< Nmin ) //
break; } }//去除不重要特征 //if(pNmin
< Nmin) //
break; } // }while(pNmin
> Nmin || run_meanshift_slec_number>60 ); //------------------------------------------------后处理--------------------------------------------------------- cvSetZero(result); for(
i = 0 ; i < k ; i ++) { cvOr(result,feature[i].result,result,NULL); } cvScale(temp_mat,temp_mat_sub,1.0,0.0); cvSplit(temp_mat_sub,cn,cn1,cn2,NULL); for(i
= 0 ; i < src->width ; i++) for(
j = 0 ; j < src->height ; j++) { if(cvGetReal2D(result,j,i)==0) //未分类的像素点。进行分类。为近期的特征中心 { double unclass_dis
, min_dis; int min_dis_index; for(
p = 0 ; p < k ; p++ ) { unclass_dis
= pow(feature[p].pt.x
- cvmGet(cn,j,i),2) //(temp_mat,i,j,0)
,2) + pow(feature[p].pt.y
- cvmGet(cn1,j,i),2) //(temp_mat,i,j,1)
,2) + pow(feature[p].pt.z
- cvmGet(cn2,j,i),2);//(temp_mat,i,j,2)
,2); if(p==0) { min_dis
= unclass_dis; min_dis_index
= p; } else { if(unclass_dis
< min_dis) { min_dis
= unclass_dis; min_dis_index
= p; } } }//
end for 与特征比較 cvSetReal2D(feature[min_dis_index].result
,j ,i ,1); } }//完毕未分类的像素点的分类 cvSetZero(final_class_mat); for(
i = 0 ; i < k ; i++) { cvSet(temp_mat,
cvScalar(rand()%255,rand()%255,rand()%255,rand()%255),
feature[i].result); cvCopy(temp_mat,final_class_mat,feature[i].result); } cvConvert(final_class_mat,dst); //删除小于Ncon大小的区域 for(
i = 0 ; i < k ; i++) { cvClearMemStorage(storage); if(seq)
cvClearSeq(seq); cvConvert(
feature[i].result , gray); cvFindContours(
gray , storage , & seq ,sizeof(CvContour)
, CV_RETR_LIST); for(temp_seq
= seq ; temp_seq ; temp_seq = temp_seq->h_next) { CvContour
* cnt = (CvContour*)seq; if(cnt->rect.width
* cnt->rect.height < Ncon) { prev_seq
= temp_seq->h_prev; if(prev_seq) { prev_seq->h_next
= temp_seq->h_next; if(temp_seq->h_next)
temp_seq->h_next->h_prev = prev_seq ; } else { seq
= temp_seq->h_next ; if(temp_seq->h_next
) temp_seq->h_next->h_prev = NULL ; } } }// cvDrawContours(src,
seq , CV_RGB(0,0,255) ,CV_RGB(0,0,255),1); } //----------------释放空间------------------------------------------------------- cvReleaseImage(&
temp); cvReleaseImage(&
gray); cvReleaseMat(&distance); cvReleaseMat(&result); cvReleaseMat(&temp_mat); cvReleaseMat(&temp_mat_sub); cvReleaseMat(&temp_mat_sub2); cvReleaseMat(&final_class_mat); cvReleaseMat(&cn); cvReleaseMat(&cn1); cvReleaseMat(&cn2); cvReleaseMat(&cn3);} |
》效果
执行时间16.5s
原图:

切割图:
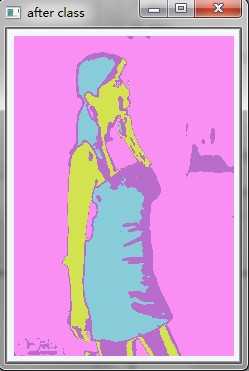
被改写了的原图:

新浪微博:http://weibo.com/u/1645794700/home?
wvr=5&c=spr_web_360_hao360_weibo_t001
【图像算法】彩色图像切割专题八:基于MeanShift的彩色切割
标签:
原文地址:http://www.cnblogs.com/gcczhongduan/p/5347731.html