标签:
《计算机视觉与算法应用》这本书其实我已经读到第四章了,之前一直都用笔记在笔记本上了,现在直接继续在这里记啦,之前的也不再补充了~
Chapter 4 特征检测与匹配
4.1 点和块
4.1.1 特征检测器

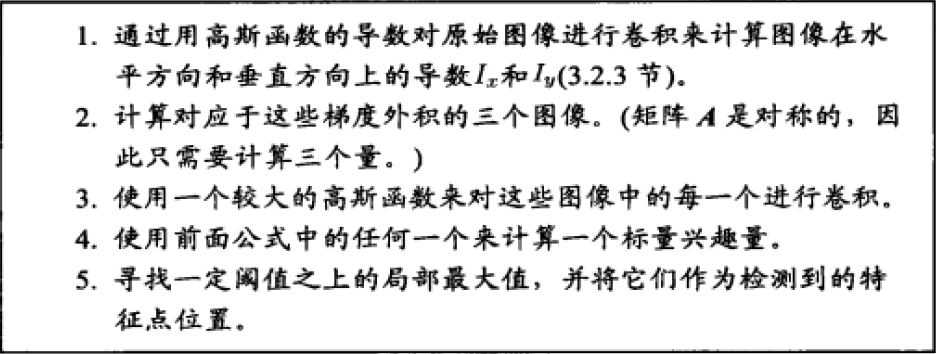
矩阵A给出了匹配块所在位置不确定度的一个下界,通过特征值分析就可以对这个不确定度进行可视化分析。
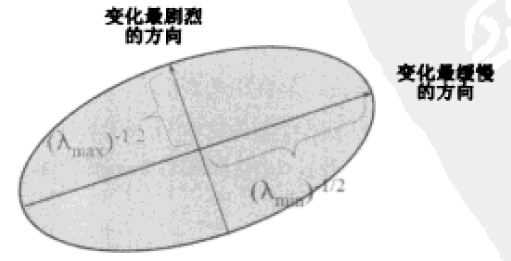
对应于自相关矩阵A的特征值分析的不确定性矩阵
![]() ,
, ![]() ,
, 
大多数特征检测器只找兴趣函数的局部最大值,导致特征点非均匀分布,对比度大的区域特征点比较密集。解决办法是只检测那些同时是局部最大值且其响应明显大于其周围半径r区域内的响应的特征。首先根据特征点的响应强度对其进行排序,然后通过不断减小抑制半径来建立第二个排序列表。
可重复性:一幅图像中检测到的关键点在另一幅变换过的图像中的对应位置的ε个像素范围内找到的频率。
每个特征点的“可用信息量”(Information Content):一个旋转不变的局部灰度描述子集合的墒。
标签:
原文地址:http://www.cnblogs.com/lifengfan/p/5410952.html