标签:
cameraclass是一个相机类,它的作用是生成非常重要的观察矩阵。本小节涉及到一点数学知识,相对前面需要只是填充,调用,算是比较有趣的吧。
cameraclass.h
1 #pragma once 2 #include <d3d11.h> 3 #include <d3dcompiler.h> 4 #include <D3DX11.h> 5 #include <xnamath.h> 6 7 #pragma comment(lib,"d3dx11.lib") 8 #pragma comment(lib,"d3d11.lib") 9 #pragma comment(lib,"d3dcompiler.lib") 10 11 class cameraclass 12 { 13 public: 14 cameraclass(); 15 ~cameraclass(); 16 17 private: 18 XMMATRIX m_viewMatrix; 19 XMVECTOR m_eye; 20 XMVECTOR m_at; 21 XMVECTOR m_up; 22 23 public: 24 void Getviewmatrix(XMMATRIX& viewMatrix); 25 void SetPositon(float x, float y, float z); 26 void SetTarget(float x, float y, float z); 27 void SetRotation(float x, float y, float z); 28 void Setfar_near(float d); 29 };
向量m_eye,m_up,m_at分别是相机位置(向量类型也可以作为位置),相机向上的方向在世界坐标的表示,观察的目标的位置。用这些就能最终生成观察矩阵。
这里只讲两个函数SetRotation()和Setfar_near()。其他的都很简单。
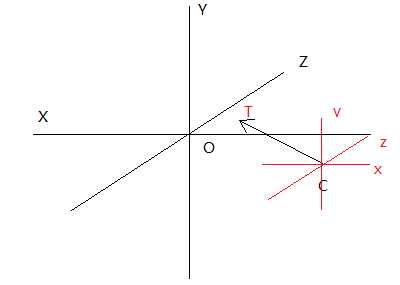
SetRotation()是设置相机俯仰角,偏航角,翻滚角。即使向量CT绕x,y,z(红色)旋转。
Setfar_near()是设置相机与自己看到的目标的距离的函数。即设置C点往CT方向做正负平移。
camera.cpp
1 #include "cameraclass.h" 2 3 4 cameraclass::cameraclass() 5 { 6 m_eye = XMVectorSet(0, 0, -5, 0); 7 m_at = XMVectorSet(0, 0, 0, 0); 8 m_up = XMVectorSet(0, 1, 0, 0); 9 } 10 11 12 cameraclass::~cameraclass() 13 { 14 } 15 16 17 void cameraclass::Getviewmatrix(XMMATRIX& viewMatrix) 18 { 19 m_viewMatrix = XMMatrixLookAtLH(m_eye, m_at, m_up); 20 viewMatrix = m_viewMatrix; 21 } 22 23 24 void cameraclass::SetPositon(float x, float y, float z) 25 { 26 m_eye = XMVectorSet(x, y, z, 0); 27 } 28 29 30 void cameraclass::SetTarget(float x, float y, float z) 31 { 32 m_at = XMVectorSet(x, y, z, 0); 33 } 34 35 36 void cameraclass::SetRotation(float x, float y, float z) 37 { 38 XMMATRIX Matrix; 39 40 Matrix = XMMatrixLookAtLH(m_eye, m_at, m_up); 41 Matrix *= XMMatrixRotationRollPitchYaw(x, y, z); 42 43 XMVECTOR v = m_at - m_eye; 44 m_at = XMVector3TransformNormal(v, Matrix); 45 } 46 47 48 void cameraclass::Setfar_near(float d) 49 { 50 XMVECTOR v, u, w; 51 v = m_at - m_eye; 52 w = XMVector3Normalize(v); 53 u = w*-d; 54 v += u; 55 m_eye = m_at - v; 56 }
SetRotation():
Setfar_near():
Getviewmatrix()
将处理好的相机位置,观察目标位置并相机向上向量作为输入,调用dx11API就得到观察矩阵。
本小节所做的东西很少,也就是一个很简单的例子。平时工作中会因为各种需求而计算观察矩阵,我们可以根据需求做相应的变换。不过在图形学里,这种需求一般不多。更多的是对模型,颜色,材质,世界空间的设计和探索
C++小项目:directx11图形程序(六):cameraclass
标签:
原文地址:http://www.cnblogs.com/woody-245/p/5598302.html