标签:blog http 2014 log c 设计 安装 程序
1、ABB程序框架
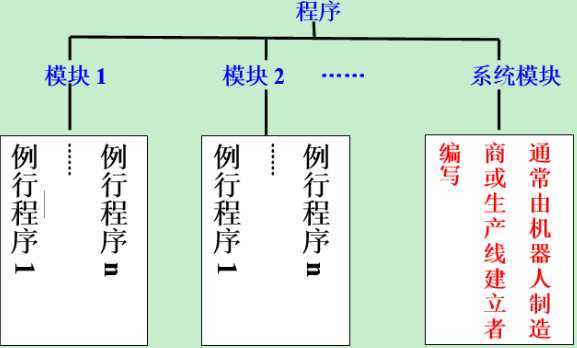
2、每一个模块表示一种机器人动作或类似动作;执行删除程序命令时,所有系统模块仍将保留,系统模块通常由机器人制造商或生产线建立者编写。例行程序包含一些指令集,它定义了机器人系统实际执行的任务。从控制器程序内存中删除程序时,也会删除所有程序模块。每个程序必须含有名为“main”的例行程序,否则程序将无法执行。
3、TCP(Tool Center Point)工具座标系是机器人运动的基准。机器人的工具坐标系是由工具中心点TCP与坐标方位组成,机器人连动时,TCP是必需的。当机器人夹具被更换,重新定义TCP后,可以不更改程序,直接运行。但是当安装新夹具后就必需要重新定义这个坐标系了。否则会影响机器人的稳定运行。系统自带的TCP坐标原点在第六轴的法栏盘中心,垂直方向为Z轴,符合右手法则。注意:在设置TCP座标的时候一定要把机器人的操作模式调到“手动限速模式”。
标签:blog http 2014 log c 设计 安装 程序
原文地址:http://www.cnblogs.com/gaohongchen01/p/3891022.html