标签:
最近学习RGBD的SLAM,收集了两个RGBD的mapping的开源工具包
1.RGBDSlam2
a.安装方法:
#准备工作空间 source /opt/ros/indigo/setup.bash mkdir -p ~/rgbdslam_catkin_ws/src cd ~/rgbdslam_catkin_ws/src catkin_init_workspace cd ~/rgbdslam_catkin_ws/ catkin_make source devel/setup.bash #获取 RGBDSLAM2 cd ~/rgbdslam_catkin_ws/src git clone https://github.com/felixendres/rgbdslam_v2.git cd ~/rgbdslam_catkin_ws/ #安装 rosdep update rosdep install rgbdslam catkin_make
b.执行方法
启动相机
roslaunch openni2_launch openni2.launch
如果使用xtion,letev的摄像头,那么需要做下消息的映射.
启动RGBDSlam
roslaunch rgbdslam openni+rgbdslam.launch
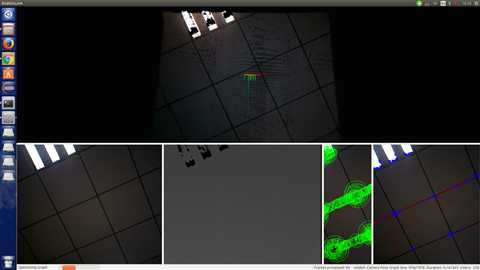
效果图
c.项目地址:https://github.com/felixendres/rgbdslam_v2
d.文献资料
[1].Endres, Felix, et al. "3-D mapping with an RGB-D camera." IEEE Transactions on Robotics 30.1 (2014): 177-187.
2.Rtabmap
a.安装方法:请参考安装文档
b.项目地址:http://introlab.github.io/rtabmap/
c.文献资料
[1].Labbé, Mathieu, and François Michaud. "Online global loop closure detection for large-scale multi-session graph-based slam." 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2014.
标签:
原文地址:http://www.cnblogs.com/cv-pr/p/5650636.html