标签:
本文属作者原创,转载请注明出处:
http://www.cnblogs.com/qxred/p/qralgorithm.html
首先推荐两个参考文献
https://www.math.kth.se/na/SF2524/matber15/qrmethod.pdf
http://people.inf.ethz.ch/arbenz/ewp/Lnotes/chapter4.pdf
我们先讨论一般对阵矩阵的QR算法,再讨论对称三对角阵的QR算法
给定一个实对称阵X,假设其特征值分解为X=PSP‘,其中P对正交阵,S是对角阵。求P,S的QR算法如下,其中为正交阵,
为上三角阵:
for k=1,2, ...
(QR分解)
endfor
将的非对角线元素置0即得S
用matlab代码表示,即
function [P,S]=qreigen
A=rand(10);
A=A+A‘ %Symmetry real matrix, otherwise P‘AP is a block upper triangle matrix
m=size(A,1);
P=eye(m);
for i=1:1000
[Q,R]=qr(A); %QR factorization
A=R*Q;
P=P*Q;
end
S=diag(diag(R));
end
这个算法很简单,每次迭代做一个QR分解和一个矩阵乘法。最基本的,我们用施密特正交化进行QR分解,这在上一篇lanczos算法及C++实现(一)框架及简单实现中使用。附录A讨论了QR方法和幂迭代方法的关系。
值得注意的是,如果矩阵X不是对称阵,这个方法往往不能收敛到一个上三角阵,而是一个块状上三角阵。(我一开始不知道,还以为程序错误,调了半天)有兴趣的同学可以试一下如下代码:
function [P,A]=qreigen A=rand(10); %not symmetry m=size(A,1); P=eye(m); for i=1:1000 [Q,R]=qr(A); %QR factorization A=R*Q; P=P*Q; end % A is block upper triangle matrix, not upper triangle A end
运行结果如下:
A =
4.7120 -0.6211 0.4352 -0.0450 -0.1297 0.5700 -0.3769 0.4790 -0.0754 0.2798
0 0.0273 0.8587 -0.2188 -0.0095 -0.1913 -0.3785 -0.2142 -0.0565 -0.1236
0 -0.9150 0.3761 -0.0914 0.0217 -0.1527 0.0317 0.4235 0.4612 -0.3284
0 -0.0000 0.0000 -0.7400 -0.0686 0.2954 0.1561 -0.1755 0.1879 -0.2237
0 -0.0000 0.0000 -0.0000 0.4096 -0.5238 -0.0330 0.1636 0.3090 -0.4849
0 0.0000 0.0000 -0.0000 0.2002 0.7429 0.2064 -0.4820 -0.2602 -0.2005
0 0 0 0.0000 -0.0000 -0.0000 -0.3812 -0.1792 -0.0188 -0.4469
0 0 0 0.0000 -0.0000 0.0000 0.4117 -0.1513 0.1134 -0.2247
0 0 0 0.0000 -0.0000 0.0000 0.0000 0.0000 -0.3465 0.0887
0 0 0 0 0 0 -0.0000 -0.0000 -0.0000 0.1833
施密特正交法每次需要O(n^3)的计算,很慢。所以通常不用这个方法。一般来说,我们采用如下QR算法,该算法分成两步:
1、利用Householder变换 (如果你对Householder变换不了解,请见附录B),将X正交变换为上海森伯格阵(Upper Hessenburg Matrix),复杂度O(n^3)。
2、在每次迭代中,利用Givens变换 (如果你对Givens变换不了解,请见附录C),求得上海森伯格阵的QR分解,复杂度O(n^2)。
这样只有在迭代之前需要O(n^3)的预处理,而每次迭代只要平方复杂度,因此比施密特正交法快很多。
在这一步,对一个方阵X(不要求对称),我们要求一个正交变换P,使得PXP‘为上海森伯格矩阵,即低于对角线下一行的所有元素为0:
如何求得这样的P呢?基本思想如下,将矩阵X分成4块:
然后用Householder变换,将左下的一列变为只有一个非零元素:
其中是一个正交矩阵,
,
是一个除第i个分量为1以外,其他分量为0的向量。P1的具体求法,参见附录B
这样我们有
类似的,我们可以构造等共n-1个矩阵,使得X正交相似于一个上海森伯格矩阵。
值得一提的是,如果X是一个对称阵,那么根据对称性,X正交相似于一个三对角阵。
首先,如果H是一个上海森伯格阵,其QR分解为H=QR,那么RQ也是一个上海森伯格阵。证明省略。
这就是说,如果我们有一个对海森伯格阵的快速QR算法,那么在每次迭代中我们可以反复使用该算法。
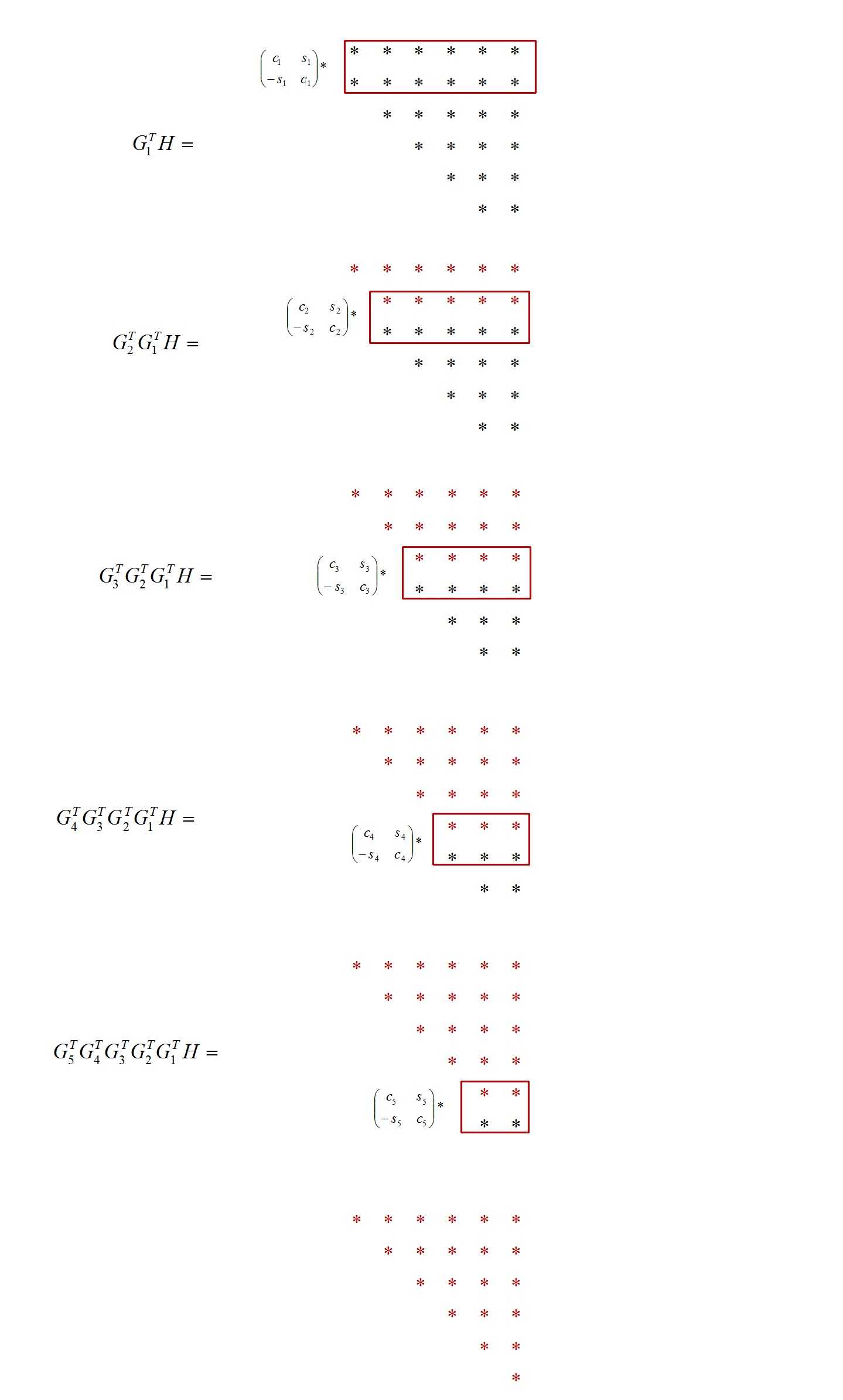
我们采用Givens变换来进行QR分解。对于n阶上海森伯格阵H,从上到下对每相邻的两行使用Given变换,每次变换都消去对角线下方的一个元素。共n-1次变换。由于Givens变换是正交变换,那么这n-1次变换的乘积也是正交变换,变换后,
变成了上三角阵。其中
是第i次Givens行变换的矩阵表示。
根据QR算法,我们需要求RQ。因此在对H进行n-1次行变换后,再从左到右对每相邻的两列使用对应的Given变换的逆变换,同样一共也是n-1次变换:
,这样我们就完成了一次迭代。
这个过程可以用下图表示:
QR分解过程,,其中红框代表当前需要考虑的H中的元素,这些元素将被更新。注意每次Givens变换将一个对角线下的元素变成0.
而R*Q的过程如下:
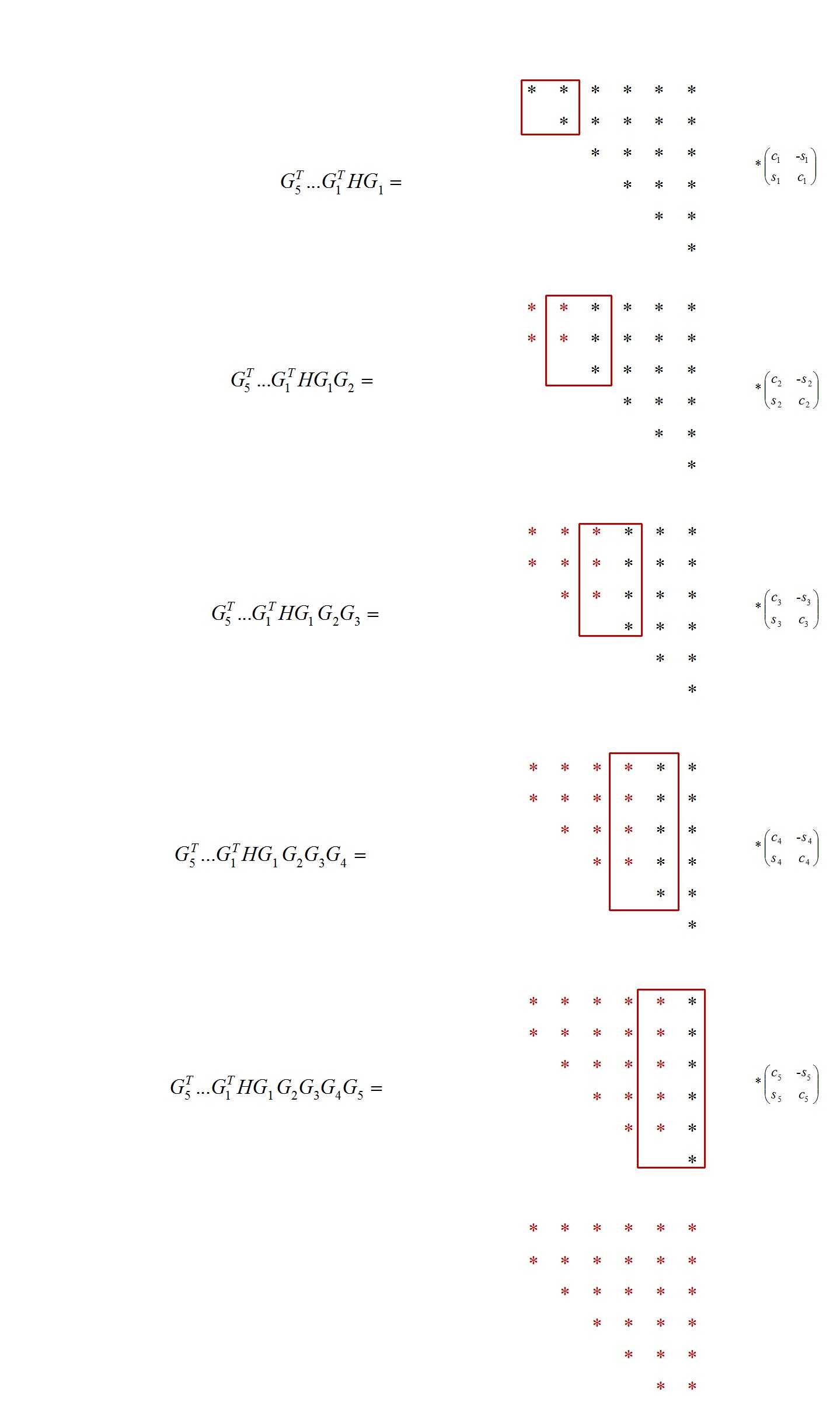
其中
将这个过程中所有产生的G乘起来就得到了H的特征向量。我们可以看到,每次迭代只需要O(n^2)的计算量,比施密特正交化快多了。
在lanczos方法中,我们得到的是一个对称三对角阵,是上海森伯格阵的特例。因此可以用上面所述方法计算特征值。值得注意的是,这里可以利用三对角阵的特性加速计算,在求第一个行变换G‘1H的时候,可以只考虑H左上的2*3的小阵,而不是整个前两行。而接下来的每次行变换也只需考虑H的2*3的子阵。在列变换中,每次只需考虑H的3*2的子阵即可。这样一次QR迭代的复杂度只有O(n)了。
由于QR算法的收敛速度取决于特征值之间的差异,差别越大,QR收敛越快。这和幂迭代算法是一致的。那么怎么加快特征值之间的差异呢?通常的做法就是平移。
假设H有两个特征值,那么QR迭代的速度为
。假如
满足
,那么矩阵
和H有相同的特征向量,其特征值为
,而求H^*的特征向量会很快,其收敛速度为
基于这样的观察,在求海森伯格矩阵的特征值时,每次迭代我们进行如下QR分解
(QR分解)
显然,这样的QR分解不改变H的特征向量,但是如果选取合适的
收敛速度要快很多。特别地,如果
恰好取到某个的特征值时,那么一次迭代即可就可确定该特征值。见文献https://www.math.kth.se/na/SF2524/matber15/qrmethod.pdf中的lemma 2.3.2。事实上我们没那么幸运,但可以用每次迭代中,H对角线上的元素可以看作是特征值的估计。所以每次计算完RQ后,取对角线上固定某个位置的元素(比如始终取第1个)作为
。但如果矩阵存在一对特征值互为相反数,那么这种方法不能收敛。比如矩阵
,因此更好的做法是Wilkinson shift,取H对角线上的2*2的方阵的特征值作为
。此外对复矩阵还有双位移方法(Double shift),这里不作详细的讨论,有兴趣的读者可以参考http://people.inf.ethz.ch/arbenz/ewp/Lnotes/chapter4.pdf
那么这样只能加速计算某个特征值,比如始终取对角线上的最后一个则加快了求解最小特征值的速度。如何加速求解其他特征值的速度呢?这里就用到了deflation。
抱歉我不知道怎么翻译这个词deflation,因此就用英文了。
Deflation是指在迭代过程中,如果对角线上某个位置的下一行几乎为0的时候,说明该位置上的值很接近于特征值了,此时将改位置所对应的行和列从矩阵中刨去,对剩下的矩阵进行计算。
一般的步骤如下,取对角线最右下的元素做deflation,直到该元素左边的元素几乎为0时,这时最小特征值已经求出,将最后一行一列去掉,对剩下的矩阵继续计算。如此反复,deflate n-1次之后,所有特征值全部求出。
最后,附上我的QR算法的C++实现。这个算法实现了这篇文章中的所有内容,包括实对称阵到上海森伯格阵的转化(hessenburgReduction函数),上海森伯格阵特征值分解的QR算法(QRHessenberg函数),三对角阵的特征值分解的QR算法(QRTridiagonal函数),每个QR算法中都用了shift和deflation加速,采用的是Wilkinson shift。在Lanczos算法中,只有QRTridiagonal函数被调用。当然如果不用lanczos方法三对角化,也可以通过hessenburgReduction函数和QRHessenberg函数来进行QR迭代求解特征值分解。具体代码参见附录 D,有三个文件svds.h, svds.cpp, main.cpp。编译时用命令g++ main.cpp svds.cpp
QR算法实际上等价于并行幂迭代算法 (Simultaneous Iteration)。在幂迭代中,如果我们用一组线性独立的向量而不是一个向量与X反复相乘,则最终得到的将是一组线性独立的向量,对其正交化后,可以 得到X的特征向量。但实际上由于幂迭代的性质,这些向量快速的收敛到主特征向量,而其他的特征向量被快速丢弃。为了保留较小特征向量的成分,每次与X相乘 后,都做一次正交化,那么这样最终这些向量将收敛到X的不同的特征向量。如果一开始选取的一组向量是单位阵,那么这种并行的幂迭代算法,实际上就是QR算 法。为什么这么说呢?我们可以看到,第一迭代,这组向量相乘X,得到X,然后正交化。而正交化实际上就是QR分解:,接着第二次迭代,我们用X乘
并正交化:
,如此我们得到
...
比较一下QR算法
...
用数学归纳法可以证明QR算法中的
和并行幂迭代中的
相同。因为当k=1时,显然成立,当k=2时
并行幂迭代中
而QR算法中
由于
是正交阵,一个矩阵在进行行正交变换(左乘正交阵)后,其QR分解中的R不变。因此两者的
相同
以此类推。可以证明两个算法中所有的
相同
然后,我们可以得到在并行幂迭代中,
而QR算法中
于是,可以得到两个算法中
的联系:
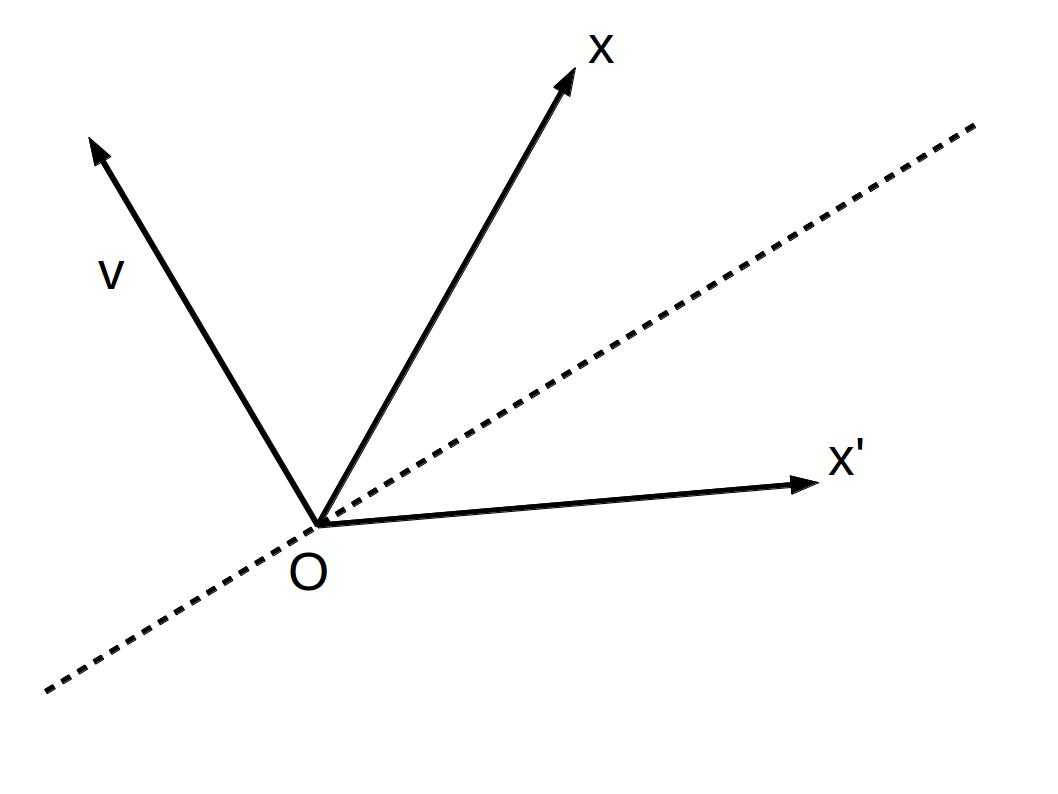
又名Householder Reflections,顾名思义,是一种镜像变换。如图,假设给定一个点x和一个过原点的平面(虚线),平面用一个垂直于它的单位向量v表示,那么对x的Householder变换就是求x关于平面v的镜像点x‘。现在我们来看怎么计算x‘
首先0指向x的向量在向量v上的投影为
,在平面v上的投影为
。所以其镜像点x‘的坐标为
这里矩阵就是一个householder矩阵,是一个对称的正交矩阵,有两个特征值,1和-1
现在我们考虑如何利用householder变换将一个向量变x成只有一个非0元素的向量,如下图所示
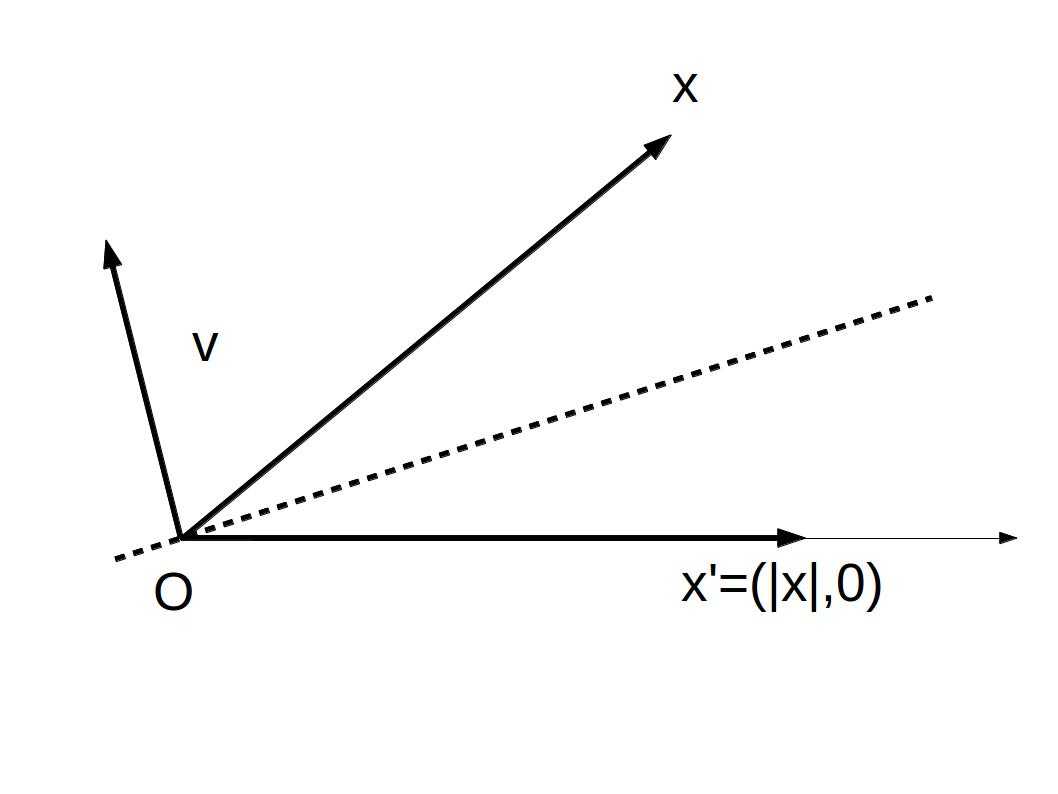
关键就是求那个平面,即v向量。由图可得出x-x‘平行于v,因此我们有
其中
又名Givens旋转,顾名思义,是对一个向量进行旋转变换,不改变向量的长度,因此是一个正交变换,其逆变换就是反方向旋转回去。
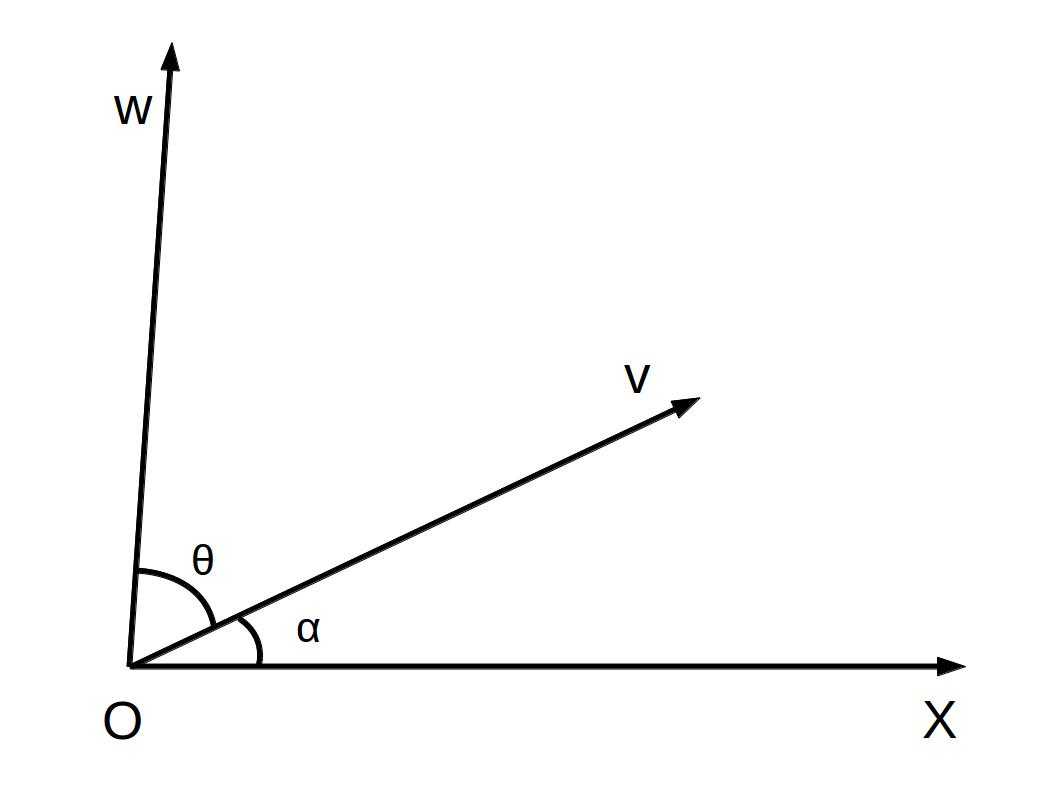
如图所示,我们考虑一个二维向量,将它逆时针旋转
角度后,求所得到的坐标。
这里我们可以将向量重新表示为,其中
是向量v与x坐标轴的夹角。
这样变换后的坐标为
其中为Givens变换矩阵,是一个正交阵,其逆阵为
svds.h
#ifndef SVDS_H #define SVDS_H #include <vector> using namespace std; class Cell{ public: unsigned int row; unsigned int col; double value; Cell():row(0),col(0),value(0){}; Cell(int r, int c, double v):row(r),col(c),value(v){}; }; class SparseMatrix{ public: unsigned int rows; unsigned int cols; vector<Cell> cells; int cellID; //read data sequentially, especially when loading large matrix from the disk. void moveFirst(){ cellID=0; } bool hasNext(){ return cellID<cells.size(); } Cell next(){ return cells[cellID++]; } }; void svds(SparseMatrix &A, int r, vector<vector<double> > &U, vector<double> &s, vector<vector<double> > &V); //decompose A = U * diag(s) *V‘ //where A is a m*n matrix //U is a m*r column orthogonal matrix //s is a length r vector //V is a n*r column orthogonal matrix void print(vector<vector<double> > &X); void hessenbergReduction(vector<vector<double> > &A, vector<vector<double> > &U); void QRHessenbergBasic(vector<vector<double> > &A, vector<vector<double> > &Q); void QRbasic(vector<vector<double> > &T, vector<vector<double> > &W); void transpose(vector<vector<double> > &A, vector<vector<double> > &T); void multiply(vector<vector<double> > &A, vector<vector<double> > &B, vector<vector<double> > &C); void QRHessenberg(vector<vector<double> > &A, vector<vector<double> > &Q); void QRTridiagonal(vector<vector<double> > &A, vector<vector<double> > &Q); #endif
svds.cpp
#include <iostream> #include <fstream> #include <vector> #include <string> #include <cmath> #include <climits> #include <cstdlib> #include <algorithm> #include<iomanip> #include "svds.h" using namespace std; const double EPS=1e-15; void print(vector<vector<double> > &X){ cout.precision(6); cout.setf(ios::fixed); for(int i=0;i<X.size();i++){ for(int j=0;j<X[i].size();j++) cout<<X[i][j]<<‘ ‘; cout<<endl; } cout<<endl; } void transpose(vector<vector<double> > &A, vector<vector<double> > &T){ if(A.empty()||A[0].empty()) return; int m=A.size(); int n=A[0].size(); T.clear(); T.resize(n,vector<double>(m,0)); for(int i=0;i<m;i++) for(int j=0;j<n;j++) T[j][i]=A[i][j]; } void transpose(vector<vector<double> > &A){ int m=A.size(); for(int i=0;i<m;i++) for(int j=i+1;j<m;j++) swap(A[i][j],A[j][i]); } void randUnitVector(int n, vector<double> &v){ srand(time(NULL)); v.clear();v.resize(n); while(true){ double r=0; for(int i=0;i<n;i++){ v[i]=rand()*1.0/RAND_MAX-0.5; r+=v[i]*v[i]; } r=sqrt(r); if(r>EPS){ for(int i=0;i<n;i++) v[i]/=r; break; } } } void multiply(vector<vector<double> > &A, vector<vector<double> > &B, vector<vector<double> > &C){ //C=A*B C.clear(); if(A.empty() || A[0].empty() || B.empty() || B[0].empty()) return ; C.resize(A.size(),vector<double>(B[0].size(),0)); for(int i=0;i<A.size();i++){ for(int j=0;j<B[0].size();j++){ C[i][j]=0; for(int k=0;k<A[0].size();k++){ C[i][j]+=A[i][k]*B[k][j]; } } } } void multiply(const vector<vector<double> > &X, const vector<double> & v, vector<double> & res){ res.clear(); if(X.empty() || v.empty()) return; int m=X[0].size(); res.resize(m,0); for(int i=0;i<m;i++){ for(int j=0;X[i].size();j++){ res[i]+=X[i][j]*v[j]; } } } double dotProduct(const vector<double> & a, const vector<double> & b){ double res=0; for(int i=0;i<a.size();i++) res+=a[i]*b[i]; return res; } void rightMultiply(SparseMatrix &A, const vector<double> & v, vector<double> & res){ //res= A*A‘*v int m=A.rows; int n=A.cols; res.clear(); res.resize(m,0); vector<double> w(n,0); A.moveFirst(); while(A.hasNext()){ Cell c=A.next(); w[c.col]+=c.value*v[c.row]; } A.moveFirst(); while(A.hasNext()){ Cell c=A.next(); res[c.row]+=c.value*w[c.col]; } } void leftMultiply(SparseMatrix &A, const vector<double> & v, vector<double> & res){ //res= A‘*A*v int m=A.rows; int n=A.cols; res.clear(); res.resize(n,0); vector<double> w(m,0); A.moveFirst(); while(A.hasNext()){ Cell c=A.next(); w[c.row]+=c.value*v[c.col]; } A.moveFirst(); while(A.hasNext()){ Cell c=A.next(); res[c.col]+=c.value*w[c.row]; } } void rightMultiply(const vector<vector<double> > & B,SparseMatrix &A, vector<vector<double> > & C){ //C= B‘*A int m=B[0].size(); int k=B.size(); int n=A.cols; for(int i=0;i<C.size();i++) fill(C[i].begin(),C[i].end(),0); A.moveFirst(); while(A.hasNext()){ Cell c=A.next(); for(int i=0;i<m;i++){ C[c.col][i]+=c.value*B[c.row][i]; } } } void leftMultiply(const vector<vector<double> > & B,SparseMatrix &A, vector<vector<double> > & C){ //C <- A B int r=B[0].size(); int n=B.size(); int m=A.rows; C.clear(); C.resize(m,vector<double>(r,0)); A.moveFirst(); while(A.hasNext()){ Cell c=A.next(); for(int i=0;i<r;i++){ C[c.row][i]+=c.value*B[c.col][i]; } } } double norm(const vector<double> &v){ double r=0; for(int i=0;i<v.size();i++) r+=v[i]*v[i]; return sqrt(r); } double normalize(vector<double> &v){ double r=0; for(int i=0;i<v.size();i++) r+=v[i]*v[i]; r=sqrt(r); if(r>EPS){ for(int i=0;i<v.size();i++) v[i]/=r; } return r; } void multiply(vector<double> &v, double d){ for(int i=0;i<v.size();i++) v[i]*=d; } void hessenbergReduction(vector<vector<double> > &A, vector<vector<double> > &U){ //A: m*m matrix //Reduction A to Hessenberg form: H=U‘AU (A=UHU‘), H overwrite A to save memory int m=A.size(); vector<double> v(m); U.clear(); U.resize(m,vector<double>(m,0)); for(int i=0;i<m;i++) U[i][i]=1; for(int i=1;i<m;i++){ fill(v.begin(),v.end(),0); for(int j=i;j<m;j++) v[j]=A[j][i-1]; v[i]-=norm(v); normalize(v); //P=I-2*v*v‘ //A=PAP //1. PA for(int j=i-1;j<m;j++){ double d=0; for(int k=i;k<m;k++) d+=A[k][j]*v[k]; for(int k=i;k<m;k++) A[k][j]-=d*2*v[k]; } //2. AP for(int j=0;j<m;j++){//row j double d=0; for(int k=i;k<m;k++) d+=A[j][k]*v[k]; for(int k=i;k<m;k++) A[j][k]-=d*2*v[k]; } //U=U*P for(int j=0;j<m;j++){ double d=0; for(int k=i;k<m;k++) d+=U[j][k]*v[k]; for(int k=i;k<m;k++) U[j][k]-=d*2*v[k]; } } } void givensRotation(double a, double b, double &c, double &s){ if(fabs(b)<EPS){ c=1;s=0; }else{ if(fabs(b)>fabs(a)){ double r=a/b; s=1/sqrt(1+r*r); c=s*r; }else{ double r=b/a; c=1/sqrt(1+r*r); s=c*r; } } } void QRTridiagonal(vector<vector<double> > &A, vector<vector<double> > &Q){ //input: A m*m symmetry tridiagonal matrix //output: Upper triangular R, and orthogonal Q, such that A=QRQ‘ int n=A.size(); Q.clear(); Q.resize(n,vector<double>(n,0)); vector<double> cs(n-1,0); vector<double> ss(n-1,0); for(int i=0;i<n;i++) Q[i][i]=1; for(int m=n;m>=2;m--){ while(1){ fill(cs.begin(),cs.end(),0); fill(ss.begin(),ss.end(),0); double delta=(A[m-2][m-2]-A[m-1][m-1])/2; double sign=1; if(delta<0) sign=-1; //Wilkinson shift double shift=A[m-1][m-1]-sign*A[m-1][m-2]*A[m-2][m-1]/(fabs(delta)+sqrt(delta*delta+A[m-1][m-2]*A[m-2][m-1])); for(int i=0;i<m;i++) A[i][i]-=shift; for(int i=0;i<m-1;i++){ double a=A[i][i]; double b=A[i+1][i]; givensRotation(a,b,cs[i],ss[i]); for(int j=i;j<=i+2 && j<m;j++){ a=A[i][j]; b=A[i+1][j]; A[i][j]=cs[i]*a+ss[i]*b; A[i+1][j]=-ss[i]*a+cs[i]*b; } } for(int j=1;j<m;j++){// cols j-1, j c -s for(int i=max(0,j-2);i<=j;i++){// rows 0 ... j [a ,b] s c double a=A[i][j-1]; double b=A[i][j]; A[i][j-1]=cs[j-1]*a+ss[j-1]*b; A[i][j]=-ss[j-1]*a+cs[j-1]*b; } } for(int i=0;i<m;i++) A[i][i]+=shift; //Q=Q*G1...Gm for(int j=1;j<m;j++){ for(int i=0;i<n;i++){ double a=Q[i][j-1]; double b=Q[i][j]; Q[i][j-1]=cs[j-1]*a+ss[j-1]*b; Q[i][j]=-ss[j-1]*a+cs[j-1]*b; } } if(fabs(A[m-1][m-2])<1e-10) break; } } } void QRHessenberg(vector<vector<double> > &A, vector<vector<double> > &Q){ //input: A m*m square Hessenberg Matrix //output: Upper triangular R, and orthogonal Q, such that A=QRQ‘ int n=A.size(); Q.clear(); Q.resize(n,vector<double>(n,0)); vector<double> cs(n-1,0); vector<double> ss(n-1,0); for(int i=0;i<n;i++) Q[i][i]=1; for(int m=n;m>=2;m--){ while(1){ fill(cs.begin(),cs.end(),0); fill(ss.begin(),ss.end(),0); double delta=(A[m-2][m-2]-A[m-1][m-1])/2; double sign=1; if(delta<0) sign=-1; //Wilkinson shift double shift=A[m-1][m-1]-sign*A[m-1][m-2]*A[m-2][m-1]/(fabs(delta)+sqrt(delta*delta+A[m-1][m-2]*A[m-2][m-1])); for(int i=0;i<m;i++) A[i][i]-=shift; for(int i=0;i<m-1;i++){ double a=A[i][i]; double b=A[i+1][i]; givensRotation(a,b,cs[i],ss[i]); for(int j=i;j<m;j++){ a=A[i][j]; b=A[i+1][j]; A[i][j]=cs[i]*a+ss[i]*b; A[i+1][j]=-ss[i]*a+cs[i]*b; } } for(int j=1;j<m;j++){// cols j-1, j c -s for(int i=0;i<=j;i++){// rows 0 ... j [a ,b] s c double a=A[i][j-1]; double b=A[i][j]; A[i][j-1]=cs[j-1]*a+ss[j-1]*b; A[i][j]=-ss[j-1]*a+cs[j-1]*b; } } for(int i=0;i<m;i++) A[i][i]+=shift; //Q=Q*G1...Gm for(int j=1;j<m;j++){ for(int i=0;i<n;i++){ double a=Q[i][j-1]; double b=Q[i][j]; Q[i][j-1]=cs[j-1]*a+ss[j-1]*b; Q[i][j]=-ss[j-1]*a+cs[j-1]*b; } } if(fabs(A[m-1][m-2])<1e-10) break; } } } void QRHessenbergBasic(vector<vector<double> > &A, vector<vector<double> > &Q){ //input: A m*m square Hessenberg Matrix //output: Upper triangular R such taht A=QRQ‘ for orthogonal matrix Q int m=A.size(); vector<double> cs(m-1,0); vector<double> ss(m-1,0); double diff=1; Q.clear(); Q.resize(m,vector<double>(m,0)); for(int i=0;i<m;i++) Q[i][i]=1; while(1){ for(int i=0;i<m-1;i++){ double a=A[i][i]; double b=A[i+1][i]; givensRotation(a,b,cs[i],ss[i]); for(int j=i;j<m;j++){ a=A[i][j]; b=A[i+1][j]; A[i][j]=cs[i]*a+ss[i]*b; A[i+1][j]=-ss[i]*a+cs[i]*b; } } for(int j=1;j<m;j++){// cols j-1, j c -s for(int i=0;i<=j;i++){// rows 0 ... j [a ,b] s c double a=A[i][j-1]; double b=A[i][j]; A[i][j-1]=cs[j-1]*a+ss[j-1]*b; A[i][j]=-ss[j-1]*a+cs[j-1]*b; } } //Q=Q*G1...Gm for(int j=1;j<m;j++){ for(int i=0;i<m;i++){ double a=Q[i][j-1]; double b=Q[i][j]; Q[i][j-1]=cs[j-1]*a+ss[j-1]*b; Q[i][j]=-ss[j-1]*a+cs[j-1]*b; } } diff=0; for(int i=0;i+1<m;i++){ diff+=A[i+1][i]*A[i+1][i]; } diff=sqrt(diff); if(diff<1e-10) break; } } void QRFactorization(vector<vector<double> > &A, vector<vector<double> > &Q, vector<vector<double> > &R){ //A=Q*R //A: m*n matrix //Q: m*m matrix //R: m*n matrix int m=A.size(); int n=A[0].size(); for(int i=0;i<Q.size();i++) fill(Q[i].begin(),Q[i].end(),0); for(int i=0;i<R.size();i++) fill(R[i].begin(),R[i].end(),0); vector<double> q(m); vector<double> r(n); for(int i=0;i<n;i++){ for(int j=0;j<m;j++) q[j]=A[j][i]; fill(r.begin(),r.end(),0); for(int j=0;j<i && j<m;j++){ r[j]=0; for(int k=0;k<q.size();k++) r[j]+=Q[k][j]*q[k]; for(int k=0;k<q.size();k++) q[k]-=Q[k][j]*r[j]; } if(i<m){ r[i]=normalize(q); for(int j=0;j<m;j++) Q[j][i]=q[j]; } for(int j=0;j<m;j++){ R[j][i]=r[j]; } } } void lanczos(SparseMatrix &A, vector<vector<double> > &P, vector<double> &alpha, vector<double> &beta, unsigned int rank){ //P‘*A*A‘*P = T = diag(alpha) + diag(beta,1) + diag(beta, -1) //P=[p1,p2, ... , pk] rank=min(A.cols,min(A.rows,rank)); vector<double> p; unsigned int m=A.rows; unsigned int n=A.cols; vector<double> prevP(m,0); randUnitVector(m,p); P.clear(); P.resize(m,vector<double>(rank,0)); vector<double> v; alpha.clear();alpha.resize(rank); beta.clear();beta.resize(rank); beta[0]=0; for(int i=0;i<rank;i++){ for(int j=0;j<p.size();j++){ P[j][i]=p[j]; } rightMultiply(A, p, v); alpha[i]=dotProduct(p,v); if(i+1<rank){ for(int j=0;j<m;j++) v[j]=v[j]-beta[i]*prevP[j]-alpha[i]*p[j]; beta[i+1]=norm(v); prevP=p; for(int j=0;j<m;j++) p[j]=v[j]/beta[i+1]; } } } void lanczosT(SparseMatrix &A, vector<vector<double> > &P, vector<double> &alpha, vector<double> &beta, unsigned int rank){ //P‘*A‘*A*P = T = diag(alpha) + diag(beta,1) + diag(beta, -1) //P=[p1,p2, ... , pk] rank=min(A.cols,min(A.rows,rank)); vector<double> p; unsigned int m=A.rows; unsigned int n=A.cols; vector<double> prevP(n,0); randUnitVector(n,p); P.clear(); P.resize(n,vector<double>(rank,0)); vector<double> v; alpha.clear();alpha.resize(rank); beta.clear();beta.resize(rank); beta[0]=0; for(int i=0;i<rank;i++){ for(int j=0;j<p.size();j++){ P[j][i]=p[j]; } leftMultiply(A, p, v); alpha[i]=dotProduct(p,v); if(i+1<rank){ for(int j=0;j<n;j++) v[j]=v[j]-beta[i]*prevP[j]-alpha[i]*p[j]; beta[i+1]=norm(v); prevP=p; for(int j=0;j<n;j++) p[j]=v[j]/beta[i+1]; } } } void QRbasic(vector<vector<double> > &T, vector<vector<double> > &W){ int l=T.size(); W.clear(); W.resize(l,vector<double>(l,0)); vector<vector<double> > Q(l,vector<double>(l,0)); vector<vector<double> > R(l,vector<double>(l,0)); vector<vector<double> > nextW(l,vector<double>(l,0)); for(int i=0;i<l;i++) W[i][i]=1; while(true){ //T=Q*R QRFactorization(T,Q,R); //T=R*Q multiply(R,Q,T); print(T); //W=W*Q; multiply(W,Q,nextW); double diff=0; for(int i=0;i<l;i++) for(int j=0;j<l;j++) diff+=(W[i][j]-nextW[i][j]) * (W[i][j]-nextW[i][j]); cout<<diff<<endl; W=nextW; if(diff<EPS*EPS) break; } } void svds(SparseMatrix &A, int r, vector<vector<double> > &U, vector<double> &s, vector<vector<double> > &V){ //A=U*diag(s)*V‘ //A:m*n matrix sparse matrix //U:m*r matrix, U[i]=i th left singular vector //s:r vector //V:n*r matrix, V[i]=i th right singular vector int m=A.rows; int n=A.cols; //lanczos: A*A‘=P*T*P‘ if(m<=n){ int l=m; vector<vector<double> > P(m,vector<double>(l,0)); vector<double> alpha(l,0); vector<double> beta(l,0); lanczos(A,P,alpha,beta,l); vector<vector<double> > T(l,vector<double>(l,0)); for(int i=0;i<l;i++){ T[i][i]=alpha[i]; if(i) T[i-1][i]=T[i][i-1]=beta[i]; } vector<vector<double> > W; QRTridiagonal(T,W); U.clear();U.resize(m,vector<double>(l)); multiply(P,W,U); for(int i=0;i<U.size();i++) U[i].resize(r); V.clear();V.resize(n,vector<double>(r)); rightMultiply(U,A,V); s.clear();s.resize(r,0); for(int i=0;i<r;i++){ for(int j=0;j<n;j++) s[i]+=V[j][i]*V[j][i]; s[i]=sqrt(s[i]); if(s[i]>EPS){ for(int j=0;j<n;j++) V[j][i]/=s[i]; } } }else{ int l=n; vector<vector<double> > P(n,vector<double>(l,0)); vector<double> alpha(l,0); vector<double> beta(l,0); lanczosT(A,P,alpha,beta,l); vector<vector<double> > T(l,vector<double>(l,0)); for(int i=0;i<l;i++){ T[i][i]=alpha[i]; if(i) T[i-1][i]=T[i][i-1]=beta[i]; } vector<vector<double> > W; QRTridiagonal(T,W); V.clear();V.resize(n,vector<double>(l,0)); U.clear();U.resize(m,vector<double>(r,0)); multiply(P,W,V); for(int i=0;i<V.size();i++) V[i].resize(r); leftMultiply(V,A,U); s.clear();s.resize(r,0); for(int i=0;i<r;i++){ for(int j=0;j<m;j++) s[i]+=U[j][i]*U[j][i]; s[i]=sqrt(s[i]); if(s[i]>EPS){ for(int j=0;j<m;j++) U[j][i]/=s[i]; } } } }
main.cpp
#include "svds.h" #include <iostream> #include <cstdlib> int main(){ cout.precision(6); cout.setf(ios::fixed); srand(time(NULL)); SparseMatrix A; A.rows=12; A.cols=15; int rank=4; for(int i=0;i<A.rows;i++){ for(int j=0;j<A.cols;j++){ A.cells.push_back(Cell(i,j,rand()*1.0/RAND_MAX-0.5)); } } vector<vector<double> > U,V; vector<double> s; svds(A,rank,U,s,V); cout<<"[U,S,V]=svds(A,r)"<<endl; cout<<"r = "<<rank<<endl; cout<<"A = "<<endl; A.moveFirst(); for(int i=0;i<A.rows;i++){ for(int j=0;j<A.cols;j++) cout<<A.next().value<<‘ ‘; cout<<endl; } cout<<endl<<endl; cout<<endl<<endl; cout<<"U = "<<endl; print(U); cout<<"s = "<<endl; for(int i=0;i<s.size();i++){ for(int j=0;j<s.size();j++){ if(i==j) cout<<s[i]<<‘ ‘; else cout<<0.0<<‘ ‘; } cout<<endl; } cout<<endl; cout<<endl; cout<<"V = "<<endl; print(V); return 0; }
lanczos算法及C++实现(二)实对称阵奇异值分解的QR算法
标签:
原文地址:http://www.cnblogs.com/qxred/p/qralgorithm.html