标签:之间 正态分布 产生 get img 技术分享 三维 分解 like
发表于 12月 30 2014
目前三维配准中用的较多的是ICP迭代算法,需要提供一个较好的初值,同时由于算法本身缺陷,最终迭代结果可能会陷入局部最优。本文介绍的是另一种比较好的配准算法,NDT配准。这个配准算法耗时稳定,跟初值相关不大,初值误差大时,也能很好的纠正过来。
A.要剔除不合适的点对(点对距离过大、包含边界点的点对)
B.基于点对的配准,并没有包含局部形状的信息
C.每次迭代都要搜索最近点,计算代价高昂
ICP的一种改进,采用极坐标代替笛卡尔坐标进行最近点搜索匹配
考虑了点云的噪音和初始位置的不确定性
需要首先建立深度图的三角面片
计算正态分布是一个一次性的工作(初始化),不需要消耗大量代价计算最近邻搜索匹配点
概率密度函数在两幅图像采集之间的时间可以离线计算出来
和NDT正态分布变换类似,利用高斯混合模型考察点和点的距离和点周围表面的相似性
缺点: 运行速度慢,在3d中实时性能不好,误差大。
计算格子的正态分布PDF参数
将第二幅scan的每个点按转移矩阵T的变换
第二幅scan的点落于reference的哪个 格子,计算响应的概率分布函数

求所有点的最优值,目标函数为
PDF可以当做表面的近似表达,协方差矩阵的特征向量和特征值可以表达表面信息(朝向、平整度)
格子内少于3个点,经常会协方差矩阵不存在逆矩阵,所以只计算点数大于5的cell,涉及到下采样方法。
NDT 耗时稳定,跟初值相关不大,初值误差大时,也能很好的纠正过来;
ICP耗时多,容易陷入局部最优;
可以根据格子cell的PDF的协方差矩阵计算特征向量特征值,每个格子有球形状、平面、线型三种类型,根据朝向作以统计,得到局部或者一幅图像的特征直方图
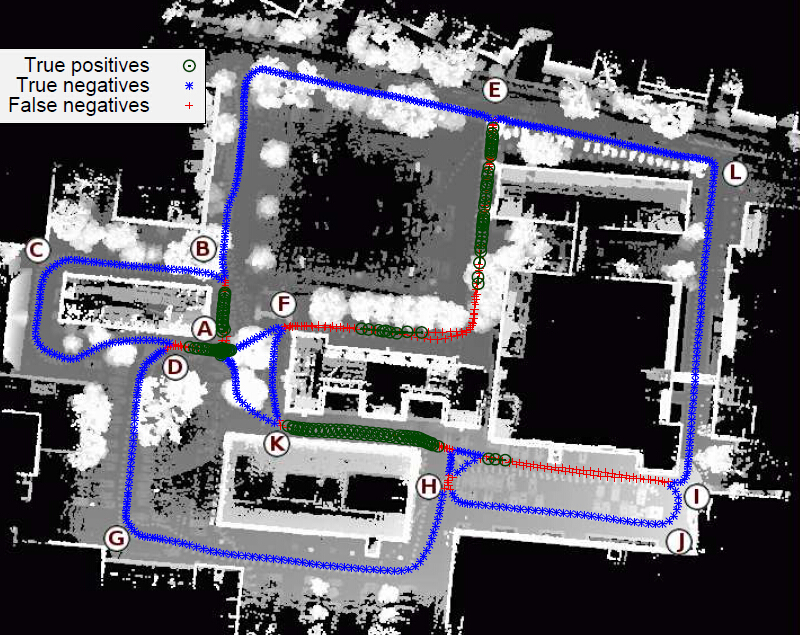
文章来自于Martin Magnusson的The Three-Dimensional Normal-Distributions Transform— an Efficient Representation for Registration,Surface Analysis, and Loop Detection。 作者详细介绍了NDT在各个条件下的配准效果及与其他配准方法的详细实验对比,并利用NDT算法配准矿洞内三维场景,同时完成SLAM任务。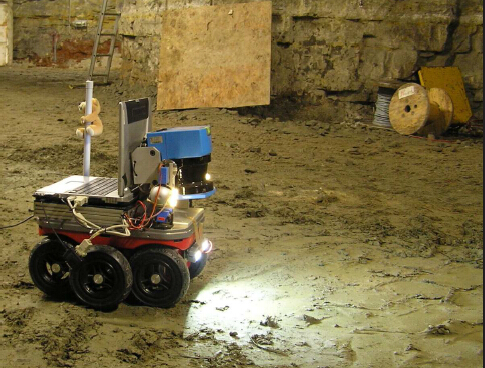
NDT(Normal Distribution Transform) 算法(与ICP对比)和一些常见配准算法
标签:之间 正态分布 产生 get img 技术分享 三维 分解 like
原文地址:http://www.cnblogs.com/sddai/p/6129446.html