标签:line ops code 终端 exec函数 中断 环境变量 mina main函数
当一个进程正常或异常终止时会向父进程发送SIGCHLD信号。对于这种信号系统默认会忽略。调用wait/waidpid的进程可能会:
#include <sys/types.h>
#include <sys/wait.h>
pid_t wait(int *statloc);
pid_t waitpid(pid_t pid, int *statloc, int options);
返回值: 成功返回进程ID, 出错-1.这两个函数区别:
如果调用者阻塞而且它有多个子进程,则在其一个子进程终止时,wait就立即返回。因为wait返回子进程ID,所以调用者知道是哪个子进程终止了。
参数statloc是一个整型指针。如果statloc不是一个空指针,则终止状态就存放到它所指向的单元内。如果不关心终止状态则将statloc设为空指针。
这两个函数返回的整型状态由实现定义。其中某些位表示退出状态(正常退出),其他位则指示信号编号(异常返回),有一位指示是否产生了一个core文件等等。POSIX.1规定终止状态用定义在<sys/wait.h>中的各个宏来查看。有三个互斥的宏可用来取得进程终止的原因,它们的名字都已WIF开始。基于这三个宏中哪一个值是真,就可选用其他宏(这三个宏之外的其他宏)来取得终止状态、信号编号等。
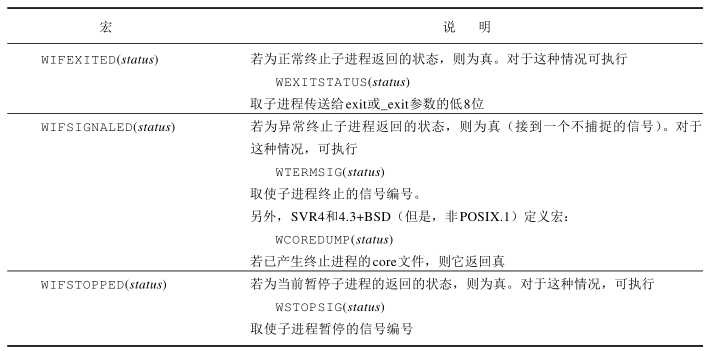
下面的程序中pr_exit函数使用上表中的宏以打印进程的终止状态。
#include <sys/types.h>
#include <sys/wait.h>
#include <stdio.h>
#include <stdlib.h>
void pr_exit(int status)
{
if (WIFEXITED(status)) {
printf("normal termination, exit status=%d\n", WEXITSTATUS(status));
} else if (WIFSIGNALED(status)) {
printf("abnormal termination, signal number = %d\n", WTERMSIG(status),
#ifdef WCOREDUMP
WCOREDUMP(status) ? "(core file generated)" : "");
#else
"");
#endif
} else if (WIFSTOPPED(status)) {
printf("child stopped, signal number = %d\n", WSTOPSIG(status));
}
}
int main(void)
{
pid_t pid;
int status;
if ((pid = fork()) < 0) {
fprintf(stderr, "fork error");
} else if (pid == 0) {
exit(7);
}
if (wait(&status) != pid) {
fprintf(stderr, "wait error");
}
pr_exit(status);
if ((pid = fork()) < 0) {
fprintf(stderr, "fork error");
} else if (pid == 0) {
abort();
}
if (wait(&status) != pid) {
fprintf(stderr, "wait error");
}
pr_exit(status);
if ((pid = fork()) < 0) {
fprintf(stderr, "fork error");
} else if (pid == 0) {
status /= 0;
}
if (wait(&status) != pid) {
fprintf(stderr, "wait error");
}
pr_exit(status);
return 0;
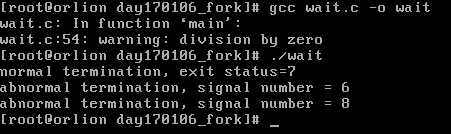
}编译运行结果:
wait是只要有一个子进程终止就返回,waitpid可以指定子进程等待。对于waitpid的pid参数:
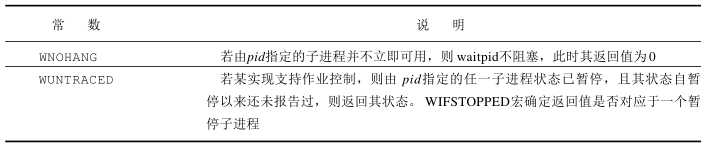
对于wait,其唯一的出错是没有子进程(函数调用被一个信号中断,也可能返回另一种出错)。对于waitpid, 如果指定的进程或进程组不存在,或者调用进程没有子进程都能出错。 options参数使我们能进一步控制waitpid的操作。此参数或者是0,或者是下表中常数的逐位或运算。
当多个进程都企图对某共享数据进行某种处理,而最后的结果又取决于进程运行的顺序,则我们认为这发生了竞态条件(race condition)。如果在fork之后的某种逻辑显式或隐式地依赖于在fork之后是父进程先运行还是子进程先运行,那么fork函数就会是竞态条件活跃的孽生地。
如果一个进程希望等待一个子进程终止,则它必须调用wait函数。如果一个进程要等待其父进程终止,则可使用下列形式的循环:
while(getppid() != 1)
sleep(1); 这种形式的循环(称为定期询问(polling))的问题是它浪费了CPU时间,因为调用者每隔1秒都被唤醒,然后进行条件测试。
为了避免竞态条件和定期询问,在多个进程之间需要有某种形式的信号机制。在UNIX中可以使用信号机制,各种形式的进程间通信(IPC)也可使用。
在父、子进程的关系中,常常有以下情况:在fork之后,父、子进程都有一些事情要做。例如:父进程可能以子进程ID更新日志文件中的一个记录,而子进程则可能要为父进程创建一个文件。在本例中,要求每个进程在执行完它的一套初始化操作后要通知对方,并且在继续运行之前,要等待另一方完成其初始化操作。这种情况可以描述为如下:
TELL_WAIT();
if ((pid = fork()) < 0) {
err_sys("fork error");
} else if (pid == 0) {
TELL_PARENT(getppid());
WAIT_PARENT();
exit(0);
}
TELL_CHILD(pid);
WAIT_CHILD();
exit(0);当进程调用exec函数时,该进程完全由新进程代换,而新程序则从其main函数开始执行。因为调用exec并不创建新进程,所以前后的进程ID不会改变。exec只是用另一个程序替换了当前进程的正文、数据、堆和栈段。
#include <unistd.h>
int execl(const char *pathname, const char *arg0, ... /* (char *) 0 */);
int execv(const char *pathname, char *const argv[]);
int execle(const char *pathname, const char *arg0, ... /* (char *)0, char *const envp[] */);
int execve(const char *pathname, char *const argv[], char *const envp[]);
int execlp(const char *filename, const char *arg0, ... /* (char *) 0 */);
int execvp(const char *filename, char *const argv[]);
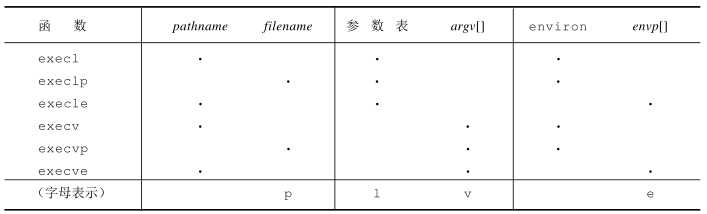
返回值:出错-1,若成功不返回这些函数之间的第一个区别是前四个取路径名作为参数,后两个取文件名作为参数。当制定filename作为参数时:
如果excelp和execvp中的任意一个使用路径前缀中的一个找到了一个可执行文件,但是该文件不是机器可执行代码文件,则就认为该文件是一个shell脚本,于是试着调用/bin/sh,并以该filename作为shell的输入。
第二个区别与参数表的传递有关(l 表示表(list),v 表示矢量(vector))。函数execl、execlp和execle要求将新程序的每个命令行参数都说明为一个单独的参数。这种参数表以空指针结尾。另外三个函数execv,execvp,execve则应先构造一个指向个参数的指针数组,然后将该数组地址作为这三个函数的参数。
最后一个区别与向新程序传递环境表相关。以 e 结尾的两个函数excele和exceve可以传递一个指向环境字符串指针数组的指针。其他四个函数则使用调用进程中的environ变量为新程序复制现存的环境。
六个函数之间的区别:
每个系统对参数表和环境表的总长度都有一个限制。当使用shell的文件名扩充功能产生一个文件名表时,可能会收到此值的限制。例如,命令:
grep _POSIX_SOURCE /usr/include/*/*.h在某些系统上可能产生下列形式的shell错误。
arg list too long执行exec后进程ID没改变。除此之外,执行新程序的进程还保持了原进程的下列特征:
对打开文件的处理与每个描述符的exec关闭标志值有关。进程中每个打开描述符都有一个exec关闭标志。若此标志设置,则在执行exec时关闭该文件描述符,否则该描述符仍打开。除非特地用fcntl设置了该标志,否则系统的默认操作是在exec后仍保持这种描述符打开。
POSIX.1明确要求在exec时关闭打开目录流。这通常是由opendir函数实现的,它调用fcntl函数为对应于打开目录流的描述符设置exec关闭标志。
在exec前后实际用户ID和实际组ID保持不变,而有效ID是否改变则取决于所执行程序的文件的设置-用户-ID位和设置-组-ID位是否设置。如果新程序的设置-用户-ID位已设置,则有效用户ID变成程序文件的所有者的ID,否则有效用户ID不变。对组ID的处理方式与此相同。
在很多UNIX实现中,这六个函数只有一个execve是系统调用。另外5个是库函数
标签:line ops code 终端 exec函数 中断 环境变量 mina main函数
原文地址:http://www.cnblogs.com/orlion/p/6259323.html