标签:方便 利用 image 这一 前向算法 动态 程序 arc log
最近研究NLP颇感兴趣,但由于比较懒,所以只好找来网上别人的比较好的博客,备份一下,也方便自己以后方便查找(其实,一般是不会再回过头来看的,嘿嘿 -_-!!)
代码自己重新写了一遍,所以就不把原文代码贴过来了。
隐马模型的评估问题即,在已知一个观察序列O=O1O2...OT,和模型μ=(A,B,π}的条件下,观察序列O的概率,即P(O|μ}
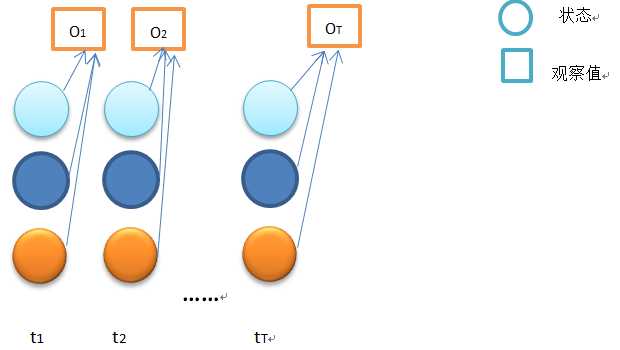
如果穷尽所有的状态组合,即S1S1...S1, S1S1...S2, S1S1...S3, ..., S3S3...S3。这样的话t1时刻有N个状态,t2时刻有N个状态...tT时刻有N个状态,这样的话一共有N*N*...*N= NT种组合,时间复杂度为O(NT),计算时,就会出现“指数爆炸”,当T很大时,简直无法计算这个值。为解决这一问题,Baum提出了前向算法。
归纳过程
首先引入前向变量αt(i):在时间t时刻,HMM输出序列为O1O2...OT,在第t时刻位于状态si的概率。
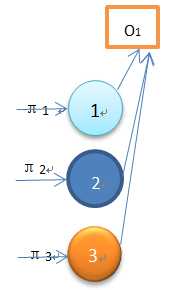
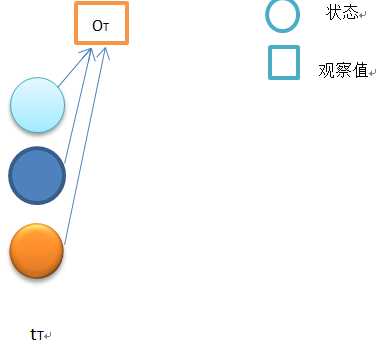
当T=1时,输出序列为O1,此时计算概率为P(O1|μ):假设有三个状态(如下图)1、2、3,输出序列为O1,有三种可能一是状态1发出,二是从状态2发出,三是从状态3发出。另外从状态1发出观察值O1得概率为b1(O1),从状态2发出观察值O1得概率为b2(O1),从状态3发出观察值O1得概率为b3(O1)。因此可以算出
P(O1|μ)= π1*b1(O1)+π2*b2(O1) + π3*b3(O1)= α1(1) + α1(2) + α1(3)
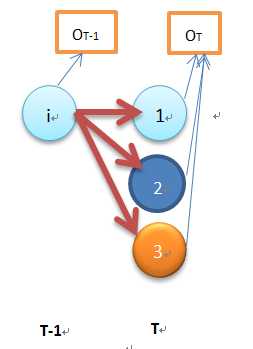
当T=2时,输出序列为O1O2,此时计算概率为P(O1O2|μ):假设有三个状态(如下图)1、2、3,输出序列为O1,有三种可能一是状态1发出,二是从状态2发出,三是从状态3发出。另外从状态1发出观察值O2得概率为b1(O2),从状态2发出观察值O2得概率为b2(O2),从状态3发出观察值O2得概率为b3(O2)。
要是从状态1发出观察值O2,可能从第一时刻的1、2或3状态装换过来,要是从状态1转换过来,概率为α1(1)*a11*b1(O2),要是从状态2转换过来,概率为α1(2)*a21*b1(O2),要是从状态3转换过来,概率为α1(3)*a31*b1(O2),因此
P(O1O2,q2=s1|μ)= α1(1)*a11*b1(O2) + α1(2)*a21*b1(O2) + α1(3)*a31*b1(O2)=α2(1)
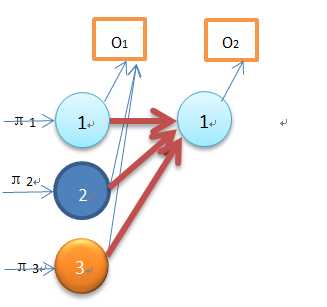
同理:P(O1O2,q2=s1|μ)= α1(1)*a12*b2(O2) + α1(2)*a22*b2(O2) + α1(3)*a32*b2(O2)=α2(2)
P(O1O2,q2=s1|μ)= α1(1)*a13*b1(O2) + α1(2)*a23*b3(O2) + α1(3)*a33*b3(O2)=α2(3)
所以:P(O1O2|μ)=P(O1O2,q2=s1|μ)+ P(O1O2,q2=s1|μ)+ P(O1O2,q2=s1|μ)
=α2(1) + α2(2) + α2(3)
以此类推。。。
前向算法
step1 初始化:α1(i) = πi*bi(O1), 1≤i≤N
step2 归纳计算:

step3 终结:
P(O|μ)=
时间复杂度
计算某时刻的某个状态的前向变量需要看前一时刻的N个状态,此时时间复杂度为O(N),每个时刻有N个状态,此时时间复杂度为N*O(N)=O(N2),又有T个时刻,所以时间复杂度为T*O(N2)=O(N2T)。
程序例证
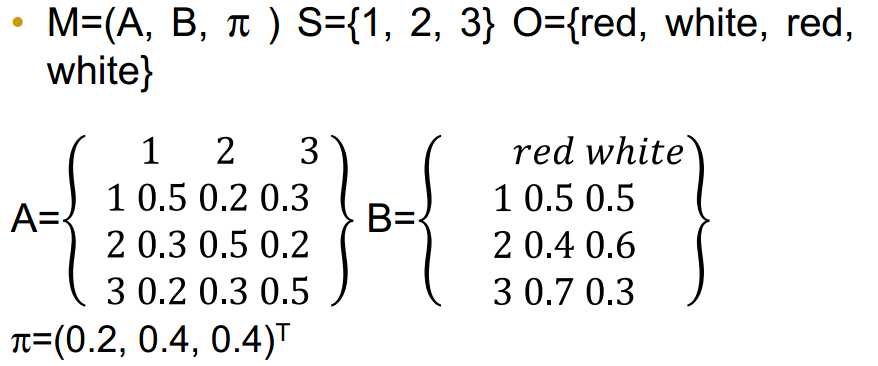
前向算法计算P(O|M):
step1:α1(1) =π1*b1(red)=0.2*0.5=0.1 α1(2)=π2*b2(red)==0.4*0.4= 0.16 α1(3)=π3*b3(red)==0.4*0.7=0.21
step2:α2(1)=α1(1)*a11*b1(white) + α1(2)*a21*b1(white) + α1(3)*a31*b1(white)
...
step3:P(O|M) = α3(1)+α3(2)+α3(3)
对于HMM的评估问题,利用动态规划可以用前向算法,从前到后算出前向变量;也可以采用后向算法,从后到前算出后向变量。
先介绍后向变量βt(i):给定模型μ=(A,B,π),并且在时间 时刻t 状态为si 的前提下,输出序列为Ot+1Ot+2...OT的概率,即
βt(i)=P(Ot+1Ot+2...OT|qt=si,μ)
归纳过程
假设仍然有3个状态
当t=T时,按照定义:时间t 状态qT 输出为OT+1......的概率,从T+1开始的输出是不存在的(因为T时刻是终止终止状态),即T之后是空,是个必然事件,因此βt(i)=1,1≤1≤N
当t=T-1时,
βT-1(i)=P(OT|qT-1=si,μ) = ai1*b1(OT)*βT(1) + ai2*b2(OT)*βT(2) + ai3*b3(OT)*βT(3)
......
当t=1时,
β1(1)=P(O2O3...OT|q2=s1,μ) = a11*b1(O2)*β2(1) + a12*b2(O2)*β2(2) + a13*b3(O2)*β2(3)
β1(2)=P(O2O3...OT|q2=s1,μ) = a21*b1(O2)*β2(1) + a22*b2(O2)*β2(2) + a23*b3(O2)*β2(3)
β1(3)=P(O2O3...OT|q2=s1,μ) = a31*b1(O2)*β2(1) + a32*b2(O2)*β2(2) + a33*b3(O2)*β2(3)
P(O1O2...OT|μ) = 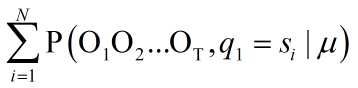
= ![]()
= 
后向算法
step1 初始化:βT(i)=1, 1≤1≤N
step2 归纳计算:
 1≤t≤T-1, 1≤i≤N
1≤t≤T-1, 1≤i≤N
step3 求终结和:
P(O|μ)= 
时间复杂度
计算某时刻在某个状态下的后向变量需要看后一时刻的N个状态,此时时间复杂度为O(N),每个时刻有N个状态,此时时间复杂度为N*O(N)=O(N2),又有T个时刻,所以时间复杂度为T*O(N2)=O(N2T)。
程序例证

后向算法
计算P(O|M):
step1:β4(1) = 1 β4(2) = 1 β4(3) = 1
step2:β3(1) = β4(1)*a11*b1(white) + β4(2)*a12*b2(white) + β4(3)*a13*b3(white)
...
step3:P(O|M) = π1*β1(1)*b1(O1) + π2*β1(2)*b2(O1) + π3*β1(3)*b3(O1)
重新回顾:
前向变量αt(i):在时刻t,在已知模型μ=(A,B,π)的条件下,状态处于si,输出序列为O102...Ot,前向变量为αt(i)
后向变量βt(i):在时刻t,在已知模型μ=(A,B,π)和状态处于si的条件下,输出序列为Ot+1Ot+2...OT,后向变量为βt(i)
公式推导:
P(O,qt=si|μ) = P(O1O2...OT, qt=si|μ)
=P(O1O2...Ot, qt=si,Ot+1Ot+2...OT|μ)
=P(O1O2...Ot, qt=si|μ) * P(Ot+1Ot+2...OT|O1O2...Ot, qt=si,μ)
=P(O1O2...Ot, qt=si|μ) * P(Ot+1Ot+2...OT|qt=si,μ)
=αt(i) * βt(i)
P(O|μ)=
案例分析:
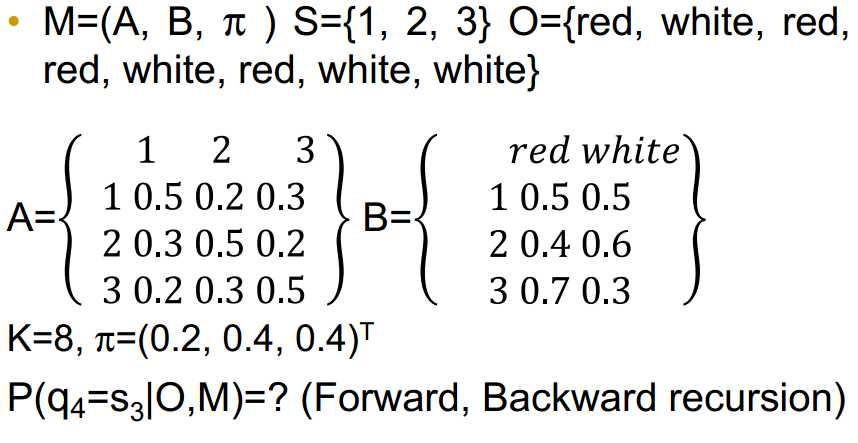
分析:
P(q4=s3|O,M) = P(q4=s3, O|M)/P(O|M)
= P(O,q4=s3|M)/P(O|M)
= α4(3) * β4(3)/ ![]()
标签:方便 利用 image 这一 前向算法 动态 程序 arc log
原文地址:http://www.cnblogs.com/sjjsxl/p/6285629.html