标签:解决方案 console within tty ati 视图 工作空间 tput git
RPLIDAR是由RoboPeak Team,SlamTec公司开发的低成本2D LIDAR解决方案。它可以扫描6度半径内的360°环境。 RPLIDAR的输出非常适合构建地图,做slam或构建3D模型。
首先你要有一个工作空间,例如:
如何构建rplidar ros包
> 1)将此项目克隆到catkin的工作空间src文件夹 https://github.com/robopeak/rplidar_ros (这是下载地址)
> 2)运行catkin_make来构建rplidarNode和rplidarNodeClient
如何运行rplidar ros软件包
检查rplidar的串行端口的权限:
ls -l / dev | grep ttyUSB
添加写权限:(如/ dev / ttyUSB0)
sudo chmod 666 / dev / ttyUSB0
有两种方法来运行rplidar ros包
I.在rviz中运行rplidar节点和视图
roslaunch rplidar_ros view_rplidar.launch
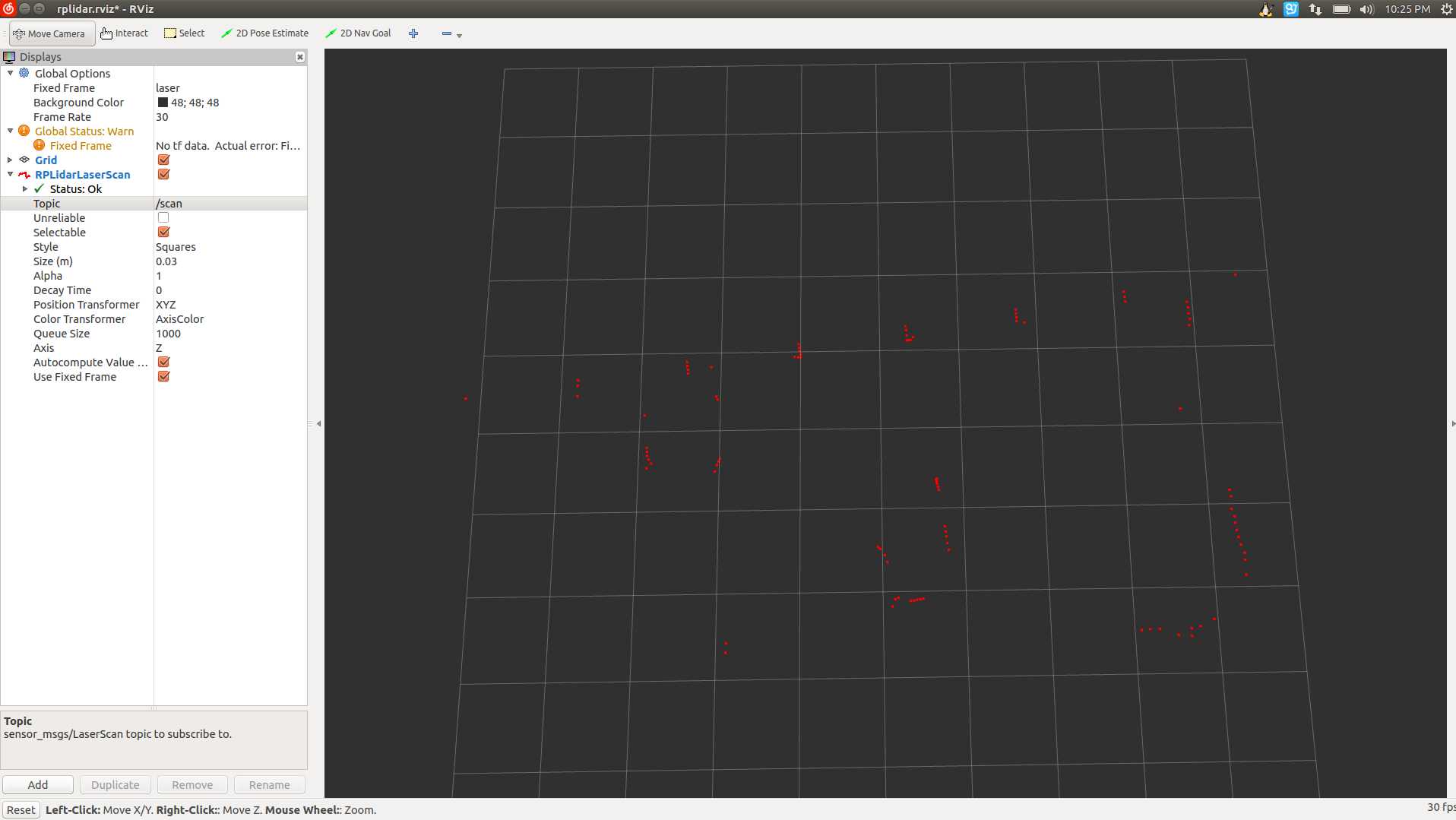
应该能在rviz中看到rplidar的扫描结果。
II。使用测试应用程序运行rplidar节点和视图
roslaunch rplidar_ros rplidar.launch
rosrun rplidar_ros rplidarNodeClient
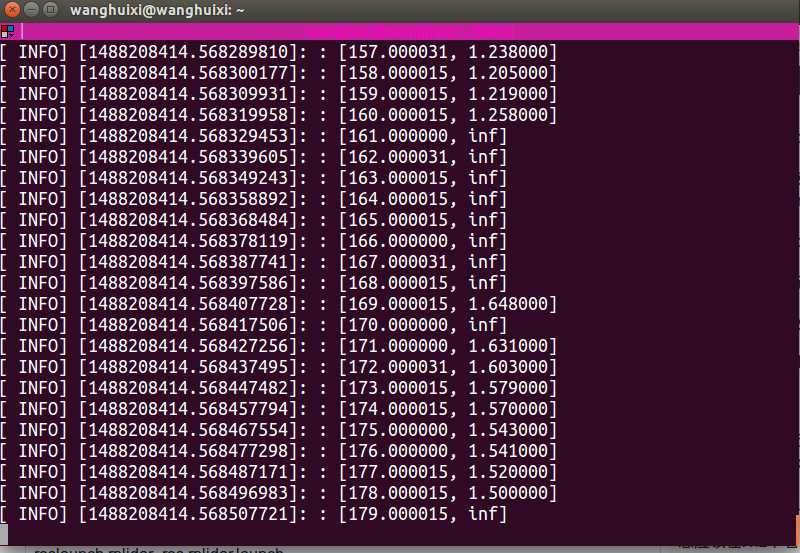
您应该在控制台中看到rplidar的扫描结果
标签:解决方案 console within tty ati 视图 工作空间 tput git
原文地址:http://www.cnblogs.com/wanghuixi/p/6476984.html