标签:bsp markers tutorial 技术 大小 颜色 hand set 相关
一、创建一个包——进行marker练习
1、创建ROS工作空间和包
mkdir -p ~/catkin_ws/src #创建工作空间目录 #创建ROS数据包 catkin_create_pkg using_markers roscpp visualization_msgs #打开包根目录,进行编译 cd ~/catkin_ws catkin_make
2、编写cpp文件,向rviz发送数据
vim ~/catkin_ws/src/using_marker/src/using_markers.cpp
贴入代码,代码中已经附加相关注释
#include <ros/ros.h> #include <visualization_msgs/Marker.h> //可视化 int main( int argc, char** argv ) { //初始化ROS,幷且创建一个ROS::Publisher 在话题visualization_marker上面 ros::init(argc, argv, "basic_shapes"); ros::NodeHandle n; ros::Rate r(1); ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 1); // Set our initial shape type to be a cube // 初始化形状为立方体 uint32_t shape = visualization_msgs::Marker::CUBE; while (ros::ok()) { //实例化一个Marker visualization_msgs::Marker marker; // Set the frame ID and timestamp. See the TF tutorials for information on these. // 设置frame ID 和 时间戳 marker.header.frame_id = "/my_frame"; marker.header.stamp = ros::Time::now(); // Set the namespace and id for this marker. This serves to create a unique ID // Any marker sent with the same namespace and id will overwrite the old one // 为这个marker设置一个独一无二的ID,一个marker接收到相同ns和id就会用新的信息代替旧的 marker.ns = "basic_shapes"; marker.id = 0; // Set the marker type. Initially this is CUBE, and cycles between that and SPHERE, ARROW, and CYLINDER // 设置marker类型,初始化是立方体。将进行循环 marker.type = shape; // Set the marker action. Options are ADD, DELETE, and new in ROS Indigo: 3 (DELETEALL) marker.action = visualization_msgs::Marker::ADD; // Set the pose of the marker. This is a full 6DOF pose relative to the frame/time specified in the header // 设置marker的位置 marker.pose.position.x = 0; marker.pose.position.y = 0; marker.pose.position.z = 0; marker.pose.orientation.x = 0.0; marker.pose.orientation.y = 0.0; marker.pose.orientation.z = 0.0; marker.pose.orientation.w = 1.0; // Set the scale of the marker -- 1x1x1 here means 1m on a side // 设置marker的大小 marker.scale.x = 1.0; marker.scale.y = 1.0; marker.scale.z = 1.0; // Set the color -- be sure to set alpha to something non-zero! // 设置marker的颜色 marker.color.r = 0.0f; marker.color.g = 1.0f; marker.color.b = 0.0f; marker.color.a = 1.0; //取消自动删除 marker.lifetime = ros::Duration(); // Publish the marker // 必须有订阅者才会发布消息 while (marker_pub.getNumSubscribers() < 1) { if (!ros::ok()) { return 0; } ROS_WARN_ONCE("Please create a subscriber to the marker"); sleep(1); } marker_pub.publish(marker); // Cycle between different shapes // 连续改变形状 switch (shape) { case visualization_msgs::Marker::CUBE: shape = visualization_msgs::Marker::SPHERE; break; case visualization_msgs::Marker::SPHERE: shape = visualization_msgs::Marker::ARROW; break; case visualization_msgs::Marker::ARROW: shape = visualization_msgs::Marker::CYLINDER; break; case visualization_msgs::Marker::CYLINDER: shape = visualization_msgs::Marker::CUBE; break; } r.sleep(); } }
在CMakeList.txt文件中加入
add_executable(basic_shapes src/basic_shapes.cpp)
target_link_libraries(basic_shapes ${catkin_LIBRARIES})
3、进行rviz设置
(1)打开roscore
(2)运行编写的发布器
rosrun using_marker basic_shapes
(3)重置rviz,运行rviz
rosmake rviz
rosrun rviz rviz
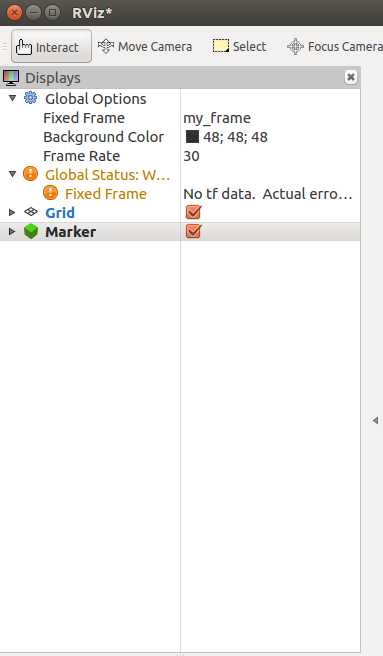
(4)在rviz中进行设置
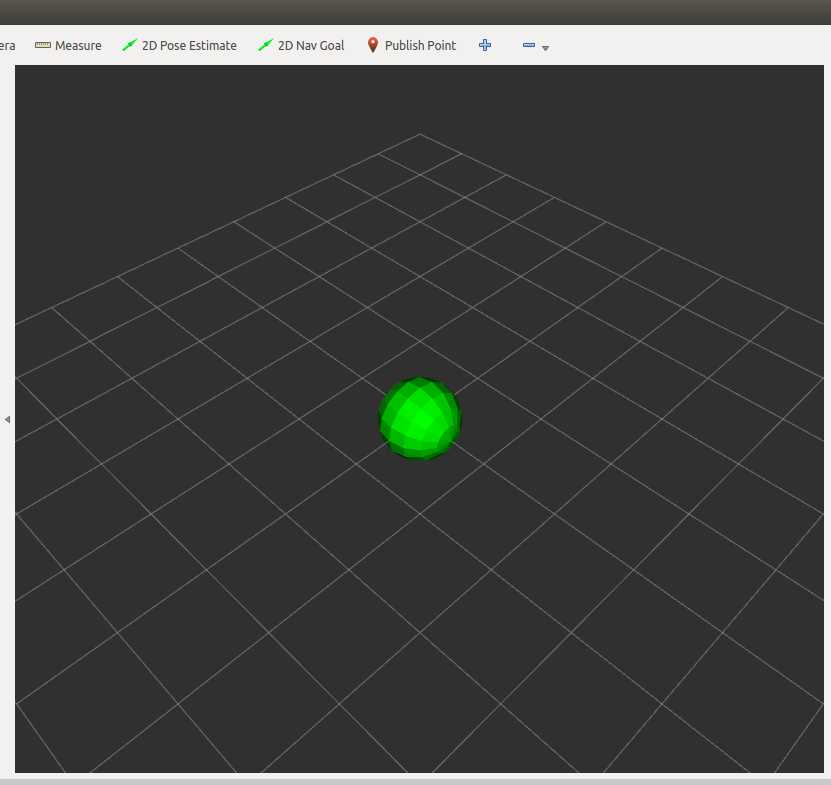
4、rviz最终效果显示:4个图形进行连续的变换
一、创建一个包——进行marker练习
1、创建ROS工作空间和包
mkdir -p ~/catkin_ws/src #创建工作空间目录
#创建ROS数据包
catkin_create_pkg using_markers roscpp visualization_msgs
#打开包根目录,进行编译
cd ~/catkin_ws
catkin_make
2、编写cpp文件,向rviz发送数据
vim ~/catkin_ws/src/using_marker/src/using_markers.cpp
贴入代码,代码中已经附加相关注释
#include <ros/ros.h>
#include <visualization_msgs/Marker.h> //可视化
int main( int argc, char** argv )
{
//初始化ROS,幷且创建一个ROS::Publisher 在话题visualization_marker上面
ros::init(argc, argv, "basic_shapes");
ros::NodeHandle n;
ros::Rate r(1);
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 1);
// Set our initial shape type to be a cube
// 初始化形状为立方体
uint32_t shape = visualization_msgs::Marker::CUBE;
while (ros::ok())
{
//实例化一个Marker
visualization_msgs::Marker marker;
// Set the frame ID and timestamp. See the TF tutorials for information on these.
// 设置frame ID 和 时间戳
marker.header.frame_id = "/my_frame";
marker.header.stamp = ros::Time::now();
// Set the namespace and id for this marker. This serves to create a unique ID
// Any marker sent with the same namespace and id will overwrite the old one
// 为这个marker设置一个独一无二的ID,一个marker接收到相同ns和id就会用新的信息代替旧的
marker.ns = "basic_shapes";
marker.id = 0;
// Set the marker type. Initially this is CUBE, and cycles between that and SPHERE, ARROW, and CYLINDER
// 设置marker类型,初始化是立方体。将进行循环
marker.type = shape;
// Set the marker action. Options are ADD, DELETE, and new in ROS Indigo: 3 (DELETEALL)
marker.action = visualization_msgs::Marker::ADD;
// Set the pose of the marker. This is a full 6DOF pose relative to the frame/time specified in the header
// 设置marker的位置
marker.pose.position.x = 0;
marker.pose.position.y = 0;
marker.pose.position.z = 0;
marker.pose.orientation.x = 0.0;
marker.pose.orientation.y = 0.0;
marker.pose.orientation.z = 0.0;
marker.pose.orientation.w = 1.0;
// Set the scale of the marker -- 1x1x1 here means 1m on a side
// 设置marker的大小
marker.scale.x = 1.0;
marker.scale.y = 1.0;
marker.scale.z = 1.0;
// Set the color -- be sure to set alpha to something non-zero!
// 设置marker的颜色
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0;
//取消自动删除
marker.lifetime = ros::Duration();
// Publish the marker
// 必须有订阅者才会发布消息
while (marker_pub.getNumSubscribers() < 1)
{
if (!ros::ok())
{
return 0;
}
ROS_WARN_ONCE("Please create a subscriber to the marker");
sleep(1);
}
marker_pub.publish(marker);
// Cycle between different shapes
// 连续改变形状
switch (shape)
{
case visualization_msgs::Marker::CUBE:
shape = visualization_msgs::Marker::SPHERE;
break;
case visualization_msgs::Marker::SPHERE:
shape = visualization_msgs::Marker::ARROW;
break;
case visualization_msgs::Marker::ARROW:
shape = visualization_msgs::Marker::CYLINDER;
break;
case visualization_msgs::Marker::CYLINDER:
shape = visualization_msgs::Marker::CUBE;
break;
}
r.sleep();
}
}
在CMakeList.txt文件中加入
add_executable(basic_shapes src/basic_shapes.cpp)
target_link_libraries(basic_shapes ${catkin_LIBRARIES})
3、进行rviz设置
(1)打开roscore
(2)运行编写的发布器
rosrun using_marker basic_shapes
(3)重置rviz,运行rviz
rosmake rviz
rosrun rviz rviz
(4)在rviz中进行设置
4、rviz最终效果显示:4个图形进行连续的变换
rviz学习笔记(一)——Markers: Sending Basic Shapes (C++) 发送基础形状
标签:bsp markers tutorial 技术 大小 颜色 hand set 相关
原文地址:http://www.cnblogs.com/BlueMountain-HaggenDazs/p/6523461.html