标签:height using nts block images geo color cpp lock
一、在using_marker/src中编写点和线代码
vim ~/catkin_ws/src/using_marker/src/points_and_lines.cpp
编写代码,其中有注释
#include <ros/ros.h> #include <visualization_msgs/Marker.h> #include <cmath> int main( int argc, char** argv ) { //创建一个发布器 ros::init(argc, argv, "points_and_lines"); ros::NodeHandle n; ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 10); ros::Rate r(30); float f = 0.0; while (ros::ok()) { visualization_msgs::Marker points, line_strip, line_list; //初始化 points.header.frame_id = line_strip.header.frame_id = line_list.header.frame_id = "/my_frame"; points.header.stamp = line_strip.header.stamp = line_list.header.stamp = ros::Time::now(); points.ns = line_strip.ns = line_list.ns = "points_and_lines"; points.action = line_strip.action = line_list.action = visualization_msgs::Marker::ADD; points.pose.orientation.w = line_strip.pose.orientation.w = line_list.pose.orientation.w = 1.0; //分配3个id points.id = 0; line_strip.id = 1; line_list.id = 2; //初始化形状 points.type = visualization_msgs::Marker::POINTS; line_strip.type = visualization_msgs::Marker::LINE_STRIP; line_list.type = visualization_msgs::Marker::LINE_LIST; //初始化大小 // POINTS markers use x and y scale for width/height respectively points.scale.x = 0.2; points.scale.y = 0.2; // LINE_STRIP/LINE_LIST markers use only the x component of scale, for the line width line_strip.scale.x = 0.1; line_list.scale.x = 0.1; //初始化颜色 // Points are green points.color.g = 1.0f; points.color.a = 1.0; // Line strip is blue line_strip.color.b = 1.0; line_strip.color.a = 1.0; // Line list is red line_list.color.r = 1.0; line_list.color.a = 1.0; // Create the vertices for the points and lines for (uint32_t i = 0; i < 100; ++i) { float y = 5 * sin(f + i / 100.0f * 2 * M_PI); float z = 5 * cos(f + i / 100.0f * 2 * M_PI); geometry_msgs::Point p; p.x = (int32_t)i - 50; p.y = y; p.z = z; points.points.push_back(p); line_strip.points.push_back(p); // The line list needs two points for each line line_list.points.push_back(p); p.z += 1.0; line_list.points.push_back(p); } marker_pub.publish(points); marker_pub.publish(line_strip); marker_pub.publish(line_list); r.sleep(); f += 0.04; } }
在CMakeLists.txt中添加
add_executable(points_and_lines src/points_and_lines.cpp)
target_link_libraries(points_and_lines ${catkin_LIBRARIES})
二、编译工程
cd ~/catkin_ws
catkin_make
三、测试
1、运行编写的发布器
rosrun using_markers points_and_lines
2、运行rviz进行设置
rosrun rviz rviz
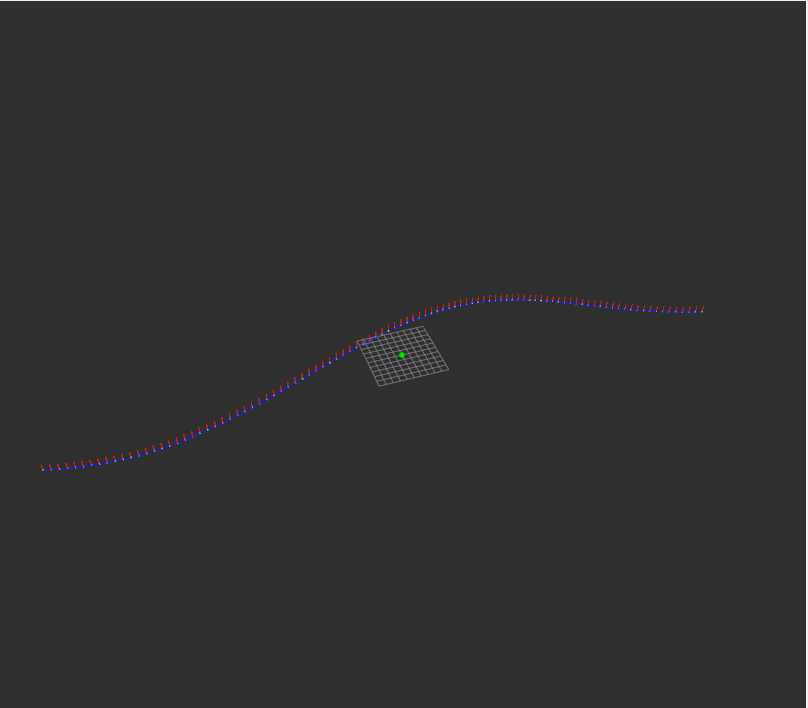
3、运行结果
rviz学习笔记(二)——Markers: Points and Lines (C++) 点和线
标签:height using nts block images geo color cpp lock
原文地址:http://www.cnblogs.com/BlueMountain-HaggenDazs/p/6523491.html