标签:over replace 知识库 img 包含 runtime 大致 oncreate clear
http://blog.csdn.net/u010503912/article/details/52315721
一.Camera构架分析
Android 的Camera包含取景(preview)和拍摄照片(take picture)的功能。目前Android发布版的Camera程序虽然功能比较简单,但是其程序的架构分成客户端和服务器两个部分,它们建立在 Android的进程间通讯Binder的结构上。Android中Camera模块同样遵循Andorid的框架,如下图所示
Camera Architecture
Camera模块主要包含了libandroid_runtime.so、libui.so和libcameraservice.so等几个库文件,它们之间的调用关系如下所示: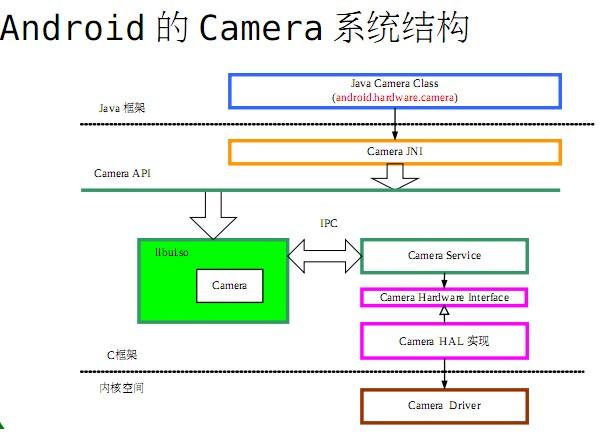
在Camera模块的各个库中,libui.so位于核心的位置,它对上层的提供的接口主要是Camera类。
libcameraservice.so是Camera的server程序,它通过继承libui.so中的类实现server的功能,并且与libui.so中的另外一部分内容通过进程间通讯(即Binder机制)的方式进行通讯。
libandroid_runtime.so 和libui.so两个库是公用的,其中除了Camera还有其他方面的功能。整个Camera在运行的时 候,可以大致上分成Client和Server两个部分,它们分别在两个进程中运行,它们之间使用Binder机制实现进程间通讯。这样在client调 用接口,功能则在server中实现,但是在client中调用就好像直接调用server中的功能,进程间通讯的部分对上层程序不可见。
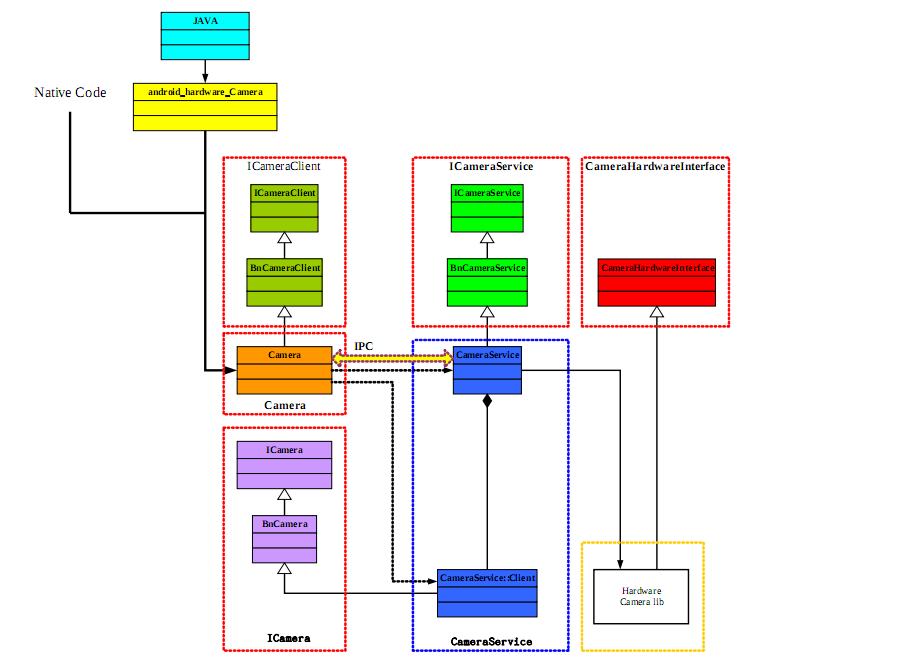
从 框架结构上来看,源码中ICameraService.h、ICameraClient.h和ICamera.h三个类定义了MeidaPlayer的 接口和 架构,ICameraService.cpp和Camera.cpp两个文件则用于Camera架构的实现,Camera的具体功能在下层调用硬件相关的 接 口来实现。
从Camera的整体结构上,类Camera是整个系统 核心,ICamera类提供了Camera主要功能的接口,在客户端方面调 用;CameraService是Camera服务,它通过调用实际的Camera硬件接口来实现功能。事实上,图中红色虚线框的部分都是Camera程 序的框架部分,它主要利用了Android的系统的Binder机制来完成通讯。蓝色虚线框的部分通过调用Camera硬件相关的接口完成具体的 Camera服 务功能,其它的部分是为上层的Java程序提供JNI接口。在整体结构上,左边可以视为一个客户端,右边是一个可以视为服务器,二者通过Android的 Bimder来实现进程间的通讯。
二.Camera工作流程概述
1.Camera Service的启动
①.App_main process: 进程通过AndroidRuntime调用register_jni_procs向JNI注册模块的native函数供JVM调用。
AndroidRuntime::registerNativeMethods(env, "android/hardware/Camera",
camMethods, NELEM(camMethods));
其中camMethods定义如下:
- static JNINativeMethod camMethods[] = {
-
- { "native_setup",
-
- "(Ljava/lang/Object;)V",
-
- (void*)android_hardware_Camera_native_setup },
-
- { "native_release",
-
- "()V",
-
- (void*)android_hardware_Camera_release },
-
- { "setPreviewDisplay",
-
- "(Landroid/view/Surface;)V",
-
- (void *)android_hardware_Camera_setPreviewDisplay },
-
- { "startPreview",
-
- "()V",
-
- (void *)android_hardware_Camera_startPreview },
-
- { "stopPreview",
-
- "()V",
-
- (void *)android_hardware_Camera_stopPreview },
-
- { "previewEnabled",
-
- "()Z",
-
- (void *)android_hardware_Camera_previewEnabled },
-
- { "setHasPreviewCallback",
-
- "(ZZ)V",
-
- (void *)android_hardware_Camera_setHasPreviewCallback },
-
- { "native_autoFocus",
-
- "()V",
-
- (void *)android_hardware_Camera_autoFocus },
-
- { "native_takePicture",
-
- "()V",
-
- (void *)android_hardware_Camera_takePicture },
-
- { "native_setParameters",
-
- "(Ljava/lang/String;)V",
-
- (void *)android_hardware_Camera_setParameters },
-
- { "native_getParameters",
-
- "()Ljava/lang/String;",
-
- (void *)android_hardware_Camera_getParameters },
-
- { "reconnect",
-
- "()V",
-
- (void*)android_hardware_Camera_reconnect },
-
- { "lock",
-
- "()I",
-
- (void*)android_hardware_Camera_lock },
-
- { "unlock",
-
- "()I",
-
- (void*)android_hardware_Camera_unlock },
-
- };
JNINativeMethod的第一个成员是一个字符串,表示了JAVA本地调用方法的名称,这个名称是在JAVA程序中调用的名称;第二个成员也是一个字符串,表示JAVA本地调用方法的参数和返回值;第三个成员是JAVA本地调用方法对应的C语言函数。
②.Mediaserver proces:进程注册了以下几个server: AudioFlinger、 MediaPlayerServer、CameraService.
- int main(int argc, char** argv)
-
- {
-
- sp proc(ProcessState::self());
-
- sp sm = defaultServiceManager();
-
- LOGI("ServiceManager: %p", sm.get());
-
- AudioFlinger::instantiate();
-
- MediaPlayerService::instantiate();
-
- CameraService::instantiate();
-
- ProcessState::self()->startThreadPool();
-
- IPCThreadState::self()->joinThreadPool();
-
- }
当向ServiceManager注册了CameraService服务后就可以响应client的请求了
2.client端向service发送请求
①.在java应用层调用onCreate()函数得到一个上层的Camera对象
- public void onCreate(Bundle icicle) {
-
- super.onCreate(icicle);
-
- Thread openCameraThread = new Thread(
-
- new Runnable() {
-
- public void run() {
-
- mCameraDevice = android.hardware.Camera.open();
-
- }
-
- }
-
- );
-
- ………………………
-
- }
②.通过Camera对象的调用成员函数,而这些成员函数会调用已向JNI注册过的native函数来调用ICamera接口的成员函数向Binder Kernel Driver发送服务请求。
③. Binder Kernel Driver接收到client的请求后,通过唤醒service的进程来处理client的请求,处理完后通过回调函数传回数据并通知上层处理已完成。
三.Camera库文件分析
上面已提到Camera模块主要包含libandroid_runtime.so、libui.so、libcameraservice.so和一个与 Camera硬件相关的底层库。其中libandroid_runtime.so、libui.so是与Android系统构架相关的不需要对其进行修 改, libcameraservice.so和Camera硬件相关的底层库则是和硬件设备相关联的,而Canera硬件相关的底层库实际上就是设备的 Linux驱动,所以Camera设备的系统集成主要通过移植Camera Linux驱动和修改libcameraservice.so库来完成。
libcameraservice.so库通过以下规则来构建:
- LOCAL_PATH:= $(call my-dir)
-
- #
-
- # Set USE_CAMERA_STUB for non-emulator and non-simulator builds, if you want
-
- # the camera service to use the fake camera. For emulator or simulator builds,
-
- # we always use the fake camera.
-
- ifeq ($(USE_CAMERA_STUB),)
-
- USE_CAMERA_STUB:=false
-
- ifneq ($(filter sooner generic sim,$(TARGET_DEVICE)),)
-
- USE_CAMERA_STUB:=true
-
- endif #libcamerastub
-
- endif ifeq ($(USE_CAMERA_STUB),true)
-
- #
-
- # libcamerastub
-
- #
-
- include $(CLEAR_VARS)
-
- LOCAL_SRC_FILES:= \
-
- CameraHardwareStub.cpp \
-
- FakeCamera.cpp
-
- LOCAL_MODULE:= libcamerastub
-
- LOCAL_SHARED_LIBRARIES:= libui
-
- include $(BUILD_STATIC_LIBRARY)
-
- endif # USE_CAMERA_STUB
-
- #
-
- # libcameraservice
-
- #
-
- include $(CLEAR_VARS)
-
- LOCAL_SRC_FILES:= \
-
- CameraService.cpp
-
- LOCAL_SHARED_LIBRARIES:= \
-
- libui \
-
- libutils \
-
- libcutils \
-
- libmedia
-
- LOCAL_MODULE:= libcameraservice
-
- LOCAL_CFLAGS+=-DLOG_TAG=\"CameraService\"
-
- ifeq ($(USE_CAMERA_STUB), true)
-
- LOCAL_STATIC_LIBRARIES += libcamerastub
-
- LOCAL_CFLAGS += -include CameraHardwareStub.h
-
- else
-
- LOCAL_SHARED_LIBRARIES += libcamera
-
- endif
-
- include $(BUILD_SHARED_LIBRARY)
在上面的构建规则中可以看到使用了宏USE_CAMERA_STUB决定 是否使用真的Camera,如果宏为真,则使用 CameraHardwareStub.cpp和FakeCamera.cpp构造一个假的Camera,如果为假则使用 libcamera来构造一个实际上的Camera服务。
在CameraHardwareStub.cpp中定义了CameraHardwareStub类,它继承并实现了抽象类 CameraHardwareInterface中定义的真正操作Camera设备的所有的纯虚函数。通过 openCameraHardware()将返回一个CameraHardwareInterface类的对象,但由于 CameraHardwareInterface类是抽象类所以它并不能创建对象,而它的派生类CameraHardwareStub完全实现了其父类的 纯虚函数所以openCameraHardware()返回一个指向派生类对象的基类指针用于底层设备的操作。由于CameraHardwareStub 类定义的函数是去操作一个假的Camera,故通过openCameraHardware返回的指针主要用于仿真环境对Camera的模拟操作,要想通过 openCameraHardware返回的指针操作真正的硬件设备则需完成以下步骤:
1. 将CameraHardwareInterface类中的所有纯虚函数的声明改为虚函数的声明(即去掉虚函数声明后的“= 0” );
- class CameraHardwareInterface : public virtual RefBase {
-
- public:
-
- virtual ~CameraHardwareInterface() { }
-
- virtual sp getPreviewHeap() const;
-
- virtual sp getRawHeap() const;
-
- virtual status_t startPreview(preview_callback cb, void* user);
-
- virtual bool useOverlay() {return false;}
-
- virtual status_t setOverlay(const sp &overlay) {return BAD_VALUE;}
-
- virtual void stopPreview();
-
- virtual bool previewEnabled();
-
- virtual status_t startRecording(recording_callback cb, void* user);
-
- virtual void stopRecording();
-
- virtual bool recordingEnabled();
-
- virtual void releaseRecordingFrame(const sp& mem);
-
- virtual status_t autoFocus(autofocus_callback,
-
- void* user);
-
-
-
- virtual status_t takePicture(shutter_callback,
-
- raw_callback,
-
- jpeg_callback,
-
- void* user);
-
- virtual status_t cancelPicture(bool cancel_shutter,
-
- bool cancel_raw,
-
- bool cancel_jpeg);
-
- virtual status_t setParameters(const CameraParameters& params);
-
- virtual CameraParameters getParameters() const;
-
- virtual void release();
-
- virtual status_t dump(int fd, const Vector& args) const ;
-
- };
2. 编写一个源文件去定义CameraHardwareInterface类中声明的所有虚函数,并实现openCameraHardware()函数让该函数返回一个CameraHardwareInterface类对象的指针;例如:
- extern "C" sp openCameraHardware()
-
- {
-
- CameraHardwareInterface realCamera;
-
- return &realCamera;
-
- }
3. 仿照其他.mk文件编写Android.mk文件用于生成一个包含步骤2编写的源文件和其他相关文件的libcamera.so文件;例如
- LOCAL_PATH := $(call my-dir)
-
- include $(CLEAR_VARS)
-
- LOCAL_MODULE := libcamera
-
- LOCAL_SHARED_LIBRARIES := \
-
- libutils \
-
- librpc \
-
- liblog
-
- LOCAL_SRC_FILES += MyCameraHardware.cpp
-
- LOCAL_CFLAGS +=
-
- LOCAL_C_INCLUDES +=
-
- LOCAL_STATIC_LIBRARIES += \
-
- libcamera-common \
-
- libclock-rpc \
-
- libcommondefs-rpc
-
- include $(BUILD_SHARED_LIBRARY)
4. 将宏USE_CAMERA_STUB改成false,这样生成libcameraservice.so时就会包含libcamera.so库。(注:如果 CameraHardwareInterface类的成员函数并没有直接操作硬件而是调用Camera的linux驱动来间接对硬件操作,那么包含这样的 CameraHardwareInterface类的libcamera.so库就相当于一个HAL)
上面左图中libcamera.so库直接操作Camera设备,这样相对于右图来说就相当于libcamera.so库包含了Camera驱动,而右图 则将驱动从库中分离出来并形成一层HAL这样做的好处是:移植不同型号或不同厂商的同类设备时只需修改HAL中很少代码即可。
Android 上Camera分析
标签:over replace 知识库 img 包含 runtime 大致 oncreate clear
原文地址:http://www.cnblogs.com/jukan/p/6678222.html