标签:均值 处理 .com 技术 images 陀螺仪 滤波 idt 技术分享
符号说明:
T:本次测量值跟上次测量值的间隔时间;
Restx(n-1)、Resty(n-1)、Restz(n-1):第n-1次的位置的最优值向量;
GRatexz(n),GRateyz(n):陀螺仪的值,单独进行滤波后第n次的值。
GRx(n)、GRy(n)、GRz(n):融合了陀螺仪的位置向量
RAx(n),RAy(n),RAz(n):第n次的加速度计的测量值向量;
Restx(n)、Resty(n)、Restz(n):第n次的位置的最优值向量;
1、得到上次的位置最优值并归一化:Restx(n-1),Resty(n-1),Restz(n-1)。
其中:Restx(n-1)*Restx(n-1)+Resty(n-1)*Resty(n-1)+Restz(n-1)*Restz(n-1) = 1*1
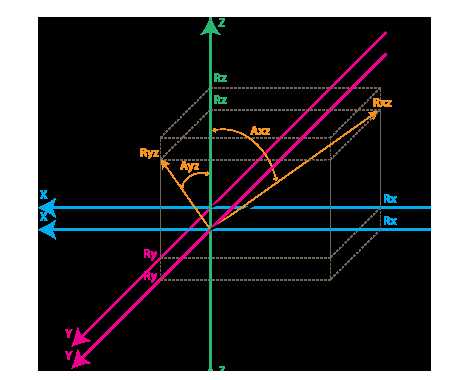
2、计算角度,根据Restx(n-1),Resty(n-1),Restz(n-1)计算出∠Axz、∠Ayz;
3、对陀螺仪的值进行归一化,得到GRatexz(n),GRateyz(n);
4、数据融合一,把陀螺仪的数据融合进去:
∠Aestxz = ∠Axz + GRatexz(n) * T;
∠Aestyz = ∠Ayz + GRateyz(n) * T;
注:GRatexz和GRateyz最好是根据本次测量值和上次测量值进行处理得到的,比如取平均值。
5、步骤2的逆运算,得到GRx(n)、GRy(n)、GRz(n):
①GRx(n)*GRx(n)+GRy(n)*GRy(n)+GRz(n)*GRz(n) = 1*1
②sin∠Aestxz = GRx(n) / sqrt[GRx(n)*GRx(n) + GRz(n)*GRz(n)]
③sin∠Aestyz =GRy(n) / sqrt[GRy(n)*GRy(n) + GRz(n)*GRz(n)]
求出GRx(n)、GRy(n)、GRz(n);
6、数据融合二,数据滤波:
(1)得到最新的加速度计的测量值,并归一化:RAx(n),RAy(n),RAz(n)。
其中:RAx(n)*RAx(n)+RAy(n)*RAy(n)+RAz(n)*RAz(n) = 1*1
(2)根据GRx(n)、GRy(n)、GRz(n)和Rax(n),Ray(n),Raz(n),进行数据处理,得到:Restx(n)、Resty(n)、Restz(n)。
至于怎么数据处理,有简单的加权平均,有复杂的卡尔曼滤波,笔者小白,只会加权平均滤波,就不献丑了。
7、重复1~7,进行下一轮的计算。
标签:均值 处理 .com 技术 images 陀螺仪 滤波 idt 技术分享
原文地址:http://www.cnblogs.com/Junbo20141201/p/6973274.html