标签:window tps gen rto end time 查看 lag arm
源码包下载:git clone https://www.kernel.org/pub/linux/kernel/v4.x/linux-4.10.8.tar.gz
或者直接去kernel.org上面进行下载。
交叉编译工具链制作:
这个已经在u-boot移植中已经做过了:http://www.cnblogs.com/kele-dad/p/6910040.html
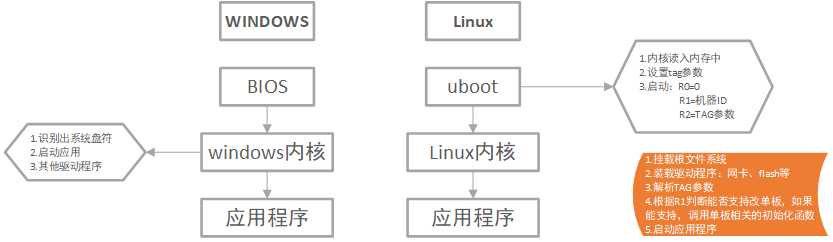
由bootloader确定启动哪块单板。
下面的行注释掉:

修改ARCH:

修改交叉编译工具链:

找到默认配置:


进入arm架构中:

可以看到我们的架构中有 mini2440的架构,同时也有s3c2410的配置文件。
进入内核根目录,配置成2410:

打开.config 文件

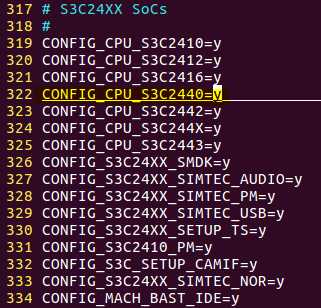
查看CPU,可以看到有2440的CPU:
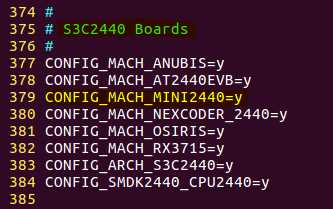
同时也支持 mini2440 的单板:
执行:make uImage
进行编译:

编译提示错误,那是因为没有安装u-boot 依赖包。
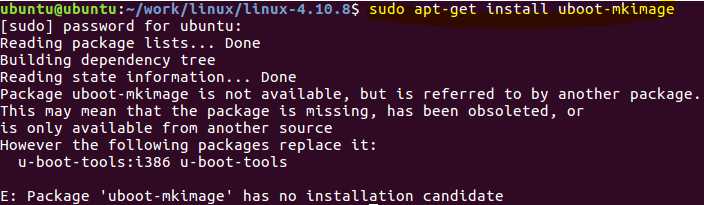
提示要安装新包
再执行编译:
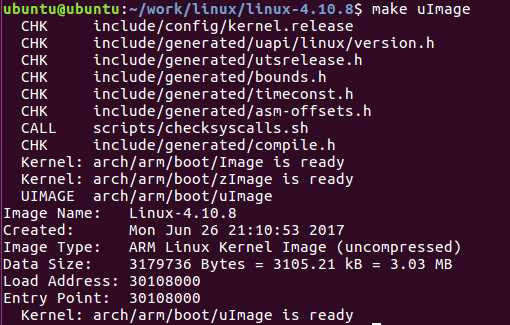
编译成功。
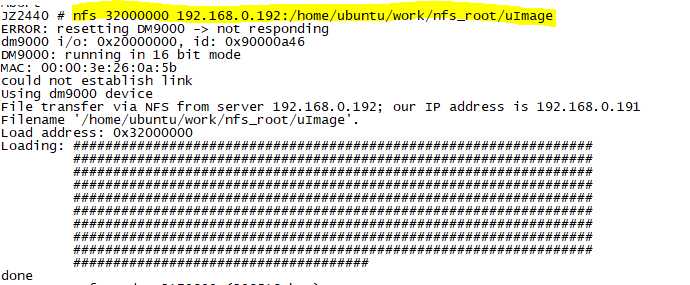
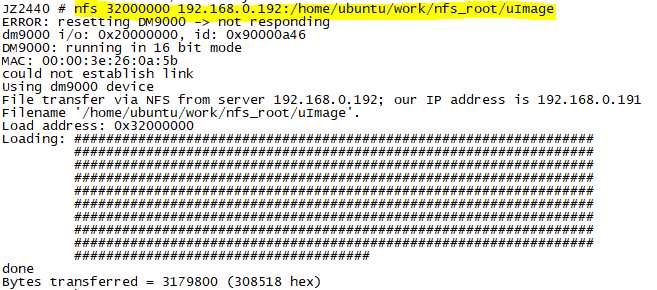
通过nfs进行烧写,nfs配置如文档:http://www.cnblogs.com/kele-dad/p/7082765.html
启动内核:bootm 32000000
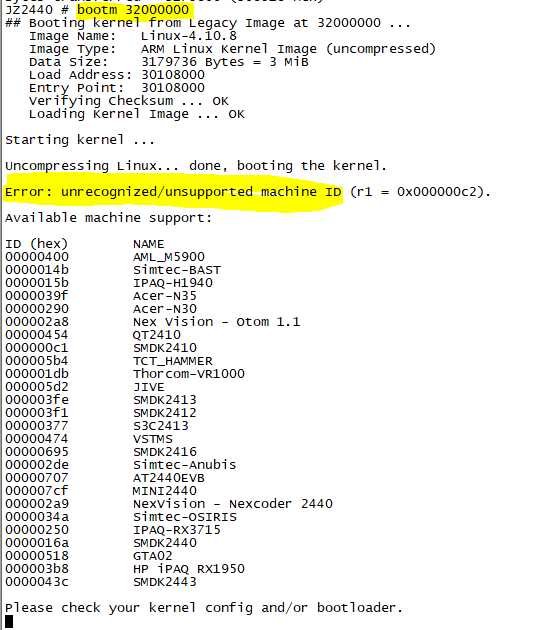
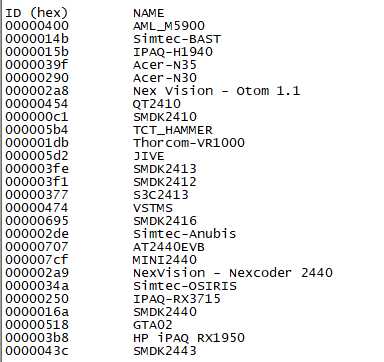
看一下打印信息,有条错误,无法识别机器ID。下面打印出来了很多机器ID。
现在我们要根据我们的机器ID 去u-boot 源码中看一下启动内核的代码了。
进入Cmd_bootm.c (common),搜索bootm,找到下面这行代码:

上面代码调用了 do_bootm 函数,进入函数中查看:
1 U_BOOT_CMD
2 do_bootm
3 do_bootm_subcommand
4 do_bootm_subcommand
5 do_bootm_states
6 boot_os_fn *boot_fn;
7 bootm_start
8 bootm_find_os
9 bootm_find_other
10 bootm_load_os
11 boot_fn = bootm_os_get_boot_func(images->os.os);
12 do_bootm_states
在do_bootm_states 中有一个结构体,boot_os_fn:
1 static boot_os_fn *boot_os[] = {
2 [IH_OS_U_BOOT] = do_bootm_standalone,
3 #ifdef CONFIG_BOOTM_LINUX
4 [IH_OS_LINUX] = do_bootm_linux,
5 #endif
6 #ifdef CONFIG_BOOTM_NETBSD
7 [IH_OS_NETBSD] = do_bootm_netbsd,
8 #endif
9 #ifdef CONFIG_LYNXKDI
10 [IH_OS_LYNXOS] = do_bootm_lynxkdi,
11 #endif
12 #ifdef CONFIG_BOOTM_RTEMS
13 [IH_OS_RTEMS] = do_bootm_rtems,
14 #endif
15 #if defined(CONFIG_BOOTM_OSE)
16 [IH_OS_OSE] = do_bootm_ose,
17 #endif
18 #if defined(CONFIG_BOOTM_PLAN9)
19 [IH_OS_PLAN9] = do_bootm_plan9,
20 #endif
21 #if defined(CONFIG_BOOTM_VXWORKS) && 22 (defined(CONFIG_PPC) || defined(CONFIG_ARM))
23 [IH_OS_VXWORKS] = do_bootm_vxworks,
24 #endif
25 #if defined(CONFIG_CMD_ELF)
26 [IH_OS_QNX] = do_bootm_qnxelf,
27 #endif
28 #ifdef CONFIG_INTEGRITY
29 [IH_OS_INTEGRITY] = do_bootm_integrity,
30 #endif
31 #ifdef CONFIG_BOOTM_OPENRTOS
32 [IH_OS_OPENRTOS] = do_bootm_openrtos,
33 #endif
34 };
在此结构体中调用的是 do_bootm_linux 函数,进入查看 Bootm.c (arch\arm\lib)
1 int do_bootm_linux(int flag, int argc, char * const argv[],
2 bootm_headers_t *images)
3 {
4 /* No need for those on ARM */
5 if (flag & BOOTM_STATE_OS_BD_T || flag & BOOTM_STATE_OS_CMDLINE)
6 return -1;
7
8 if (flag & BOOTM_STATE_OS_PREP) {
9 boot_prep_linux(images);
10 return 0;
11 }
12
13 if (flag & (BOOTM_STATE_OS_GO | BOOTM_STATE_OS_FAKE_GO)) {
14 boot_jump_linux(images, flag);
15 return 0;
16 }
17
18 boot_prep_linux(images);
19 boot_jump_linux(images, flag);
20 return 0;
21 }
在最后一句中执行 boot_jump_linux 函数:
1 /* Subcommand: GO */
2 static void boot_jump_linux(bootm_headers_t *images, int flag)
3 {
4 unsigned long machid = gd->bd->bi_arch_number;
5 char *s;
6 void (*kernel_entry)(int zero, int arch, uint params);
7 unsigned long r2;
8 int fake = (flag & BOOTM_STATE_OS_FAKE_GO);
9
10 kernel_entry = (void (*)(int, int, uint))images->ep;
11
12 s = getenv("machid");
13 if (s) {
14 if (strict_strtoul(s, 16, &machid) < 0) {
15 debug("strict_strtoul failed!\n");
16 return;
17 }
18 printf("Using machid 0x%lx from environment\n", machid);
19 }
20 bootstage_mark(BOOTSTAGE_ID_RUN_OS);
21 announce_and_cleanup(fake);
22
23 if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len)
24 r2 = (unsigned long)images->ft_addr;
25 else
26 r2 = gd->bd->bi_boot_params;
27
28 if (!fake) {
29 kernel_entry(0, machid, r2);
30 }
31 }
从环境变量中获取mach_id ,然后进入 kernel。如果没有从环境变量获取,就采用默认值,此函数的第一句就是默认值。看看默认值是多少。
machid = gd->bd->bi_arch_number;
在Jz2440.c (board\samsung\jz2440) 中 设置了默认ID:
1 int board_init(void)
2 {
3 /* arch number of JZ2440 board */
4 gd->bd->bi_arch_number = MACH_TYPE_JZ2440;
5
6 /* adress of boot parameters */
7 gd->bd->bi_boot_params = 0x30000100;
8
9 icache_enable();
10 dcache_enable();
11
12 return 0;
13 }
同时在Board_f.c (common) 的 setup_machine中也有设置ID:
1 static int setup_machine(void)
2 {
3 #ifdef CONFIG_MACH_TYPE
4 gd->bd->bi_arch_number = CONFIG_MACH_TYPE; /* board id for Linux */
5 #endif
6 return 0;
7 }
CONFIG_MACH_TYPE 这个宏我们没有设置。
那么我们的上一个设置ID的函数是有效的。
在Mach-types.h (arch\arm\include\asm) 中设置的ID为194。

然后在内核处,进入arch/arm/s3c24x0/ 目录,里面有很多我们的支持s3c24x0的板子,进入smdk2440的单板文件 mach-smdk2440.c:
MACHINE_START(S3C2440, "SMDK2440")
/* Maintainer: Ben Dooks <ben-linux@fluff.org> */
.atag_offset = 0x100,
.init_irq = s3c2440_init_irq,
.map_io = smdk2440_map_io,
.init_machine = smdk2440_machine_init,
.init_time = smdk2440_init_time,
MACHINE_END
在MACHINE_START中,就是根据mchine ID找到单板文件的。MACHINE_START的定义如下:
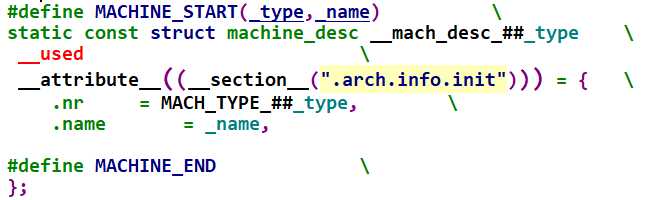
展开后, .nr = MACH_TYPE_S3C2440,查找一下这个宏。

generated 是临时生成的文件目录。可以看一下 mach-types.h:
这是smdk2440的机器码

这是mini2440的机器码

可以对照我们的u-boot打印看出来:
16进制转换成10进制就可以算出来了。
根据以上的内容,我们可以在u-boot 中设置我们的 mach_id 的环境变量来启动内核,或者我们可以直接修改 u-boot 的默认ID值和这里的机器ID匹配即可。
修改成mini2440的机器ID。直接修改u-boot源码:
把mini2440改成如下:

jz2440改成如下:

这两个定义的机器码进行了对调而已。
在 include/configs/jz2440.h 中设置启动参数,要加上波特率设置,否则会有乱码。mini2440的内核文件中设置的波特率为115200,smdk2440的为16M。

然后编译烧写u-boot。
进入u-boot 记得 print查看一下环境变量,如果 波特率没有改变过来 就重新设置一下:

保存一下。然后烧入内核
启动内核:
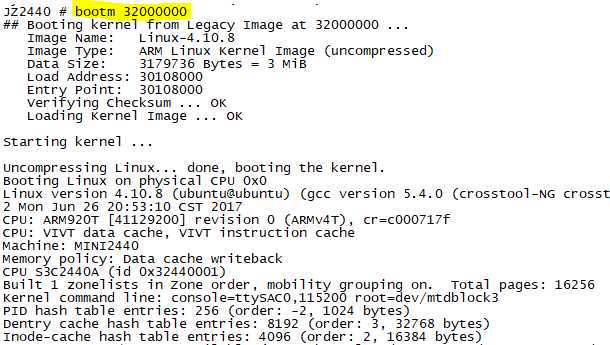
已经有打印信息了。
linux4.10.8 内核移植(一)---环境搭建及适配单板。
标签:window tps gen rto end time 查看 lag arm
原文地址:http://www.cnblogs.com/kele-dad/p/7082682.html