标签:目标 too class turn images pair set hdu int
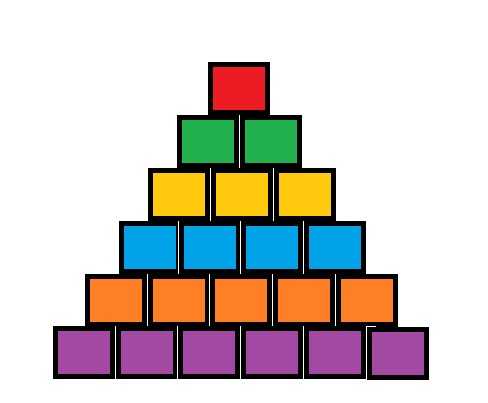
一个舰队的目标状态如上图。红色是旗舰。然后给你初始局面,每一次决策可以把旗舰和其上一层或下一层的两个相邻的进行交换。如果能在20步内出解的话,输出最小步数;否则输出“too difficult”。
把每个方块当成0~5的数,整个状态正好可以压缩成1个21位的6进制数,恰好可以用long long存下,可以用set / 哈希表存储。
定义估价函数f(S)表示局面S的每个格子所在层数与它的目标状态所在层的差的绝对值之和。
这样每一次移动最多使这个值减小2,如果这个值大于(20-已经走的步数)*2,则剪枝。
#include<cstdio>
#include<algorithm>
#include<queue>
#include<set>
using namespace std;
const int dx[]={1,1,-1,-1},dy[]={0,1,0,-1};
typedef long long ll;
typedef pair<int,int> Point;
set<ll>S;
int T;
struct Node{
ll st;
Point pos;
int d;
Node(){}
Node(const ll &st,const Point &pos,const int &d){
this->st=st;
this->pos=pos;
this->d=d;
}
};
int ceng[25];
int Abs(int x){
return x<0 ? (-x) : x;
}
int calc(ll x){
int res=0;
for(int i=0;i<=20;++i){
res+=Abs((int)(x%6ll)-ceng[i]);
x/=6;
}
return res;
}
queue<Node>q;
int wei[8][8];
ll pw[30];
int main(){
int x;
// freopen("1001.in","r",stdin);
// freopen("1001.out","w",stdout);
pw[0]=1;
for(int i=1;i<=20;++i){
pw[i]=pw[i-1]*6ll;
}
scanf("%d",&T);
ceng[0]=ceng[1]=ceng[2]=ceng[3]=ceng[4]=ceng[5]=5;
ceng[6]=ceng[7]=ceng[8]=ceng[9]=ceng[10]=4;
ceng[11]=ceng[12]=ceng[13]=ceng[14]=3;
ceng[15]=ceng[16]=ceng[17]=2;
ceng[18]=ceng[19]=1;
ceng[20]=0;
int pen=20;
for(int i=0;i<6;++i){
for(int j=0;j<=i;++j){
wei[i][j]=pen;
--pen;
}
}
ll goal=0;
for(int i=0;i<6;++i){
for(int j=0;j<=i;++j){
goal=goal*6ll+(ll)i;
}
}
for(;T;--T){
S.clear();
ll st=0;
Point stapos;
for(int i=0;i<6;++i){
for(int j=0;j<=i;++j){
scanf("%d",&x);
if(x==0){
stapos=Point(i,j);
}
st=st*6ll+(ll)x;
}
}
if(st==goal){
puts("0");
continue;
}
S.insert(st);
bool ok=0;
while(!q.empty()){
q.pop();
}
q.push(Node(st,stapos,0));
while(!q.empty()){
Node U=q.front(); q.pop();
// ll now=U.st;
// for(int i=0;i<6;++i){
// for(int j=0;j<=i;++j){
// printf("%I64d ",now/pw[wei[i][j]]%6ll);
// }
// puts("");
// }
// puts("");
if(U.d>=20){
continue;
}
for(int i=0;i<4;++i){
int tx=U.pos.first+dx[i],ty=U.pos.second+dy[i];
if(tx>=0 && tx<=5 && ty>=0 && ty<=tx){
ll nextst=U.st-pw[wei[tx][ty]]*(U.st/pw[wei[tx][ty]]%6ll);
nextst+=pw[wei[U.pos.first][U.pos.second]]*(U.st/pw[wei[tx][ty]]%6ll);
int tmp=calc(nextst);
if(S.find(nextst)==S.end() && tmp<=(20-(U.d+1))*2){
if(nextst==goal){
ok=1;
printf("%d\n",U.d+1);
break;
}
S.insert(nextst);
q.push(Node(nextst,Point(tx,ty),U.d+1));
}
}
}
if(ok){
break;
}
}
if(!ok){
puts("too difficult");
}
}
return 0;
}
标签:目标 too class turn images pair set hdu int
原文地址:http://www.cnblogs.com/autsky-jadek/p/7425397.html