标签:get his methods sse 情况 any rman load double
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写。它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概率得出一个合理的结果;为了提高概率必须提高迭代次数。该算法最早由Fischler和Bolles于1981年提出。
RANSAC的基本假设是:
(1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
(2)“局外点”是不能适应该模型的数据;
(3)除此之外的数据属于噪声。
局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设。
RANSAC也做了以下假设:给定一组(通常很小的)局内点,存在一个可以估计模型参数的过程;而该模型能够解释或者适用于局内点。
本文内容
1 示例
2 概述
3 算法
4 参数
5 优点与缺点
6 应用
7 参考文献
8 外部链接
9 算法源码
一、示例
一个简单的例子是从一组观测数据中找出合适的2维直线。假设观测数据中包含局内点和局外点,其中局内点近似的被直线所通过,而局外点远离于直线。简单的最小二乘法不能找到适应于局内点的直线,原因是最小二乘法尽量去适应包括局外点在内的所有点。相反,RANSAC能得出一个仅仅用局内点计算出模型,并且概率还足够高。但是,RANSAC并不能保证结果一定正确,为了保证算法有足够高的合理概率,我们必须小心的选择算法的参数。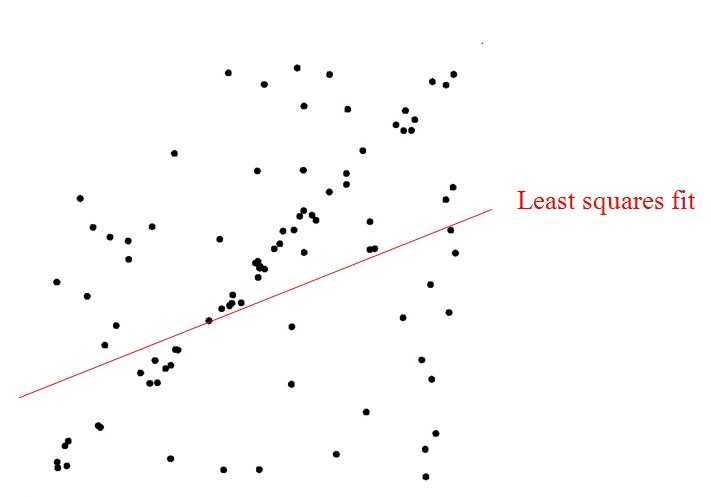
最小二乘法找到的直线
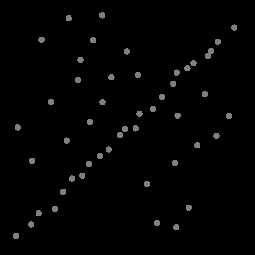
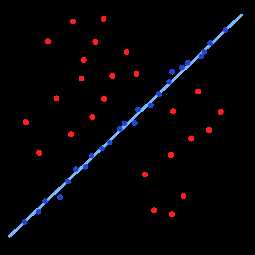
左图:包含很多局外点的数据集 右图:RANSAC找到的直线(局外点并不影响结果)
二、概述
RANSAC算法的输入是一组观测数据,一个可以解释或者适应于观测数据的参数化模型,一些可信的参数。
RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后,用所有假设的局内点去重新估计模型,因为它仅仅被初始的假设局内点估计过。
5.最后,通过估计局内点与模型的错误率来评估模型。
这个过程被重复执行固定的次数,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。
整个过程可参考下图: 
三、算法
伪码形式的算法如下所示:
输入:
data —— 一组观测数据
model —— 适应于数据的模型
n —— 适用于模型的最少数据个数
k —— 算法的迭代次数
t —— 用于决定数据是否适应于模型的阀值
d —— 判定模型是否适用于数据集的数据数目
输出:
best_model —— 跟数据最匹配的模型参数(如果没有找到好的模型,返回null)
best_consensus_set —— 估计出模型的数据点
best_error —— 跟数据相关的估计出的模型错误
iterations = 0
best_model = null
best_consensus_set = null
best_error = 无穷大
while ( iterations < k )
maybe_inliers = 从数据集中随机选择n个点
maybe_model = 适合于maybe_inliers的模型参数
consensus_set = maybe_inliers
for ( 每个数据集中不属于maybe_inliers的点 )
if ( 如果点适合于maybe_model,且错误小于t )
将点添加到consensus_set
if ( consensus_set中的元素数目大于d )
已经找到了好的模型,现在测试该模型到底有多好
better_model = 适合于consensus_set中所有点的模型参数
this_error = better_model究竟如何适合这些点的度量
if ( this_error < best_error )
我们发现了比以前好的模型,保存该模型直到更好的模型出现
best_model = better_model
best_consensus_set = consensus_set
best_error = this_error
增加迭代次数
返回 best_model, best_consensus_set, best_error
RANSAC算法的可能变化包括以下几种:
(1)如果发现了一种足够好的模型(该模型有足够小的错误率),则跳出主循环。这样可能会节约计算额外参数的时间。
(2)直接从maybe_model计算this_error,而不从consensus_set重新估计模型。这样可能会节约比较两种模型错误的时间,但可能会对噪声更敏感。
四、参数
我们不得不根据特定的问题和数据集通过实验来确定参数t和d。然而参数k(迭代次数)可以从理论结果推断。当我们从估计模型参数时,用p表示一些迭代过程中从数据集内随机选取出的点均为局内点的概率;此时,结果模型很可能有用,因此p也表征了算法产生有用结果的概率。用w表示每次从数据集中选取一个局内点的概率,如下式所示:
w = 局内点的数目 / 数据集的数目
通常情况下,我们事先并不知道w的值,但是可以给出一些鲁棒的值。假设估计模型需要选定n个点,wn是所有n个点均为局内点的概率;1 ? wn是n个点中至少有一个点为局外点的概率,此时表明我们从数据集中估计出了一个不好的模型。 (1 ? wn)k表示算法永远都不会选择到n个点均为局内点的概率,它和1-p相同。因此,
1 ? p = (1 ? wn)k
我们对上式的两边取对数,得出
值得注意的是,这个结果假设n个点都是独立选择的;也就是说,某个点被选定之后,它可能会被后续的迭代过程重复选定到。这种方法通常都不合理,由此推导出的k值被看作是选取不重复点的上限。例如,要从上图中的数据集寻找适合的直线,RANSAC算法通常在每次迭代时选取2个点,计算通过这两点的直线maybe_model,要求这两点必须唯一。
为了得到更可信的参数,标准偏差或它的乘积可以被加到k上。k的标准偏差定义为:
五、优点与缺点
RANSAC的优点是它能鲁棒的估计模型参数。例如,它能从包含大量局外点的数据集中估计出高精度的参数。RANSAC的缺点是它计算参数的迭代次数没有上限;如果设置迭代次数的上限,得到的结果可能不是最优的结果,甚至可能得到错误的结果。RANSAC只有一定的概率得到可信的模型,概率与迭代次数成正比。RANSAC的另一个缺点是它要求设置跟问题相关的阀值。
RANSAC只能从特定的数据集中估计出一个模型,如果存在两个(或多个)模型,RANSAC不能找到别的模型。
六、应用
RANSAC算法经常用于计算机视觉,例如同时求解相关问题与估计立体摄像机的基础矩阵。
在模型确定以及最大迭代次数允许的情况下,RANSAC总是能找到最优解。经过我的实验,对于包含80%误差的数据集,RANSAC的效果远优于直接的最小二乘法。
RANSAC可以用于哪些场景呢?最著名的莫过于图片的拼接技术。优于镜头的限制,往往需要多张照片才能拍下那种巨幅的风景。在多幅图像合成时,事先会在待合成的图片中提取一些关键的特征点。计算机视觉的研究表明,不同视角下物体往往可以通过一个透视矩(3X3或2X2)阵的变换而得到。RANSAC被用于拟合这个模型的参数(矩阵各行列的值),由此便可识别出不同照片中的同一物体。可参考下图: 


另外,RANSAC还可以用于图像搜索时的纠错与物体识别定位。下图中,有几条直线是SIFT匹配算法的误判,RANSAC有效地将其识别,并将正确的模型(书本)用线框标注出来: 
七、参考文献
八、外部链接
九、算法源码
Ziv Yaniv源码
1 #include <math.h> 2 #include "LineParamEstimator.h" 3 4 LineParamEstimator::LineParamEstimator(double delta) : m_deltaSquared(delta*delta) {} 5 /*****************************************************************************/ 6 /* 7 * Compute the line parameters [n_x,n_y,a_x,a_y] 8 * 通过输入的两点来确定所在直线,采用法线向量的方式来表示,以兼容平行或垂直的情况 9 * 其中n_x,n_y为归一化后,与原点构成的法线向量,a_x,a_y为直线上任意一点 10 */ 11 void LineParamEstimator::estimate(std::vector<Point2D *> &data, 12 std::vector<double> ¶meters) 13 { 14 parameters.clear(); 15 if(data.size()<2) 16 return; 17 double nx = data[1]->y - data[0]->y; 18 double ny = data[0]->x - data[1]->x;// 原始直线的斜率为K,则法线的斜率为-1/k 19 double norm = sqrt(nx*nx + ny*ny); 20 21 parameters.push_back(nx/norm); 22 parameters.push_back(ny/norm); 23 parameters.push_back(data[0]->x); 24 parameters.push_back(data[0]->y); 25 } 26 /*****************************************************************************/ 27 /* 28 * Compute the line parameters [n_x,n_y,a_x,a_y] 29 * 使用最小二乘法,从输入点中拟合出确定直线模型的所需参量 30 */ 31 void LineParamEstimator::leastSquaresEstimate(std::vector<Point2D *> &data, 32 std::vector<double> ¶meters) 33 { 34 double meanX, meanY, nx, ny, norm; 35 double covMat11, covMat12, covMat21, covMat22; // The entries of the symmetric covarinace matrix 36 int i, dataSize = data.size(); 37 38 parameters.clear(); 39 if(data.size()<2) 40 return; 41 42 meanX = meanY = 0.0; 43 covMat11 = covMat12 = covMat21 = covMat22 = 0; 44 for(i=0; i<dataSize; i++) { 45 meanX +=data[i]->x; 46 meanY +=data[i]->y; 47 48 covMat11 +=data[i]->x * data[i]->x; 49 covMat12 +=data[i]->x * data[i]->y; 50 covMat22 +=data[i]->y * data[i]->y; 51 } 52 53 meanX/=dataSize; 54 meanY/=dataSize; 55 56 covMat11 -= dataSize*meanX*meanX; 57 covMat12 -= dataSize*meanX*meanY; 58 covMat22 -= dataSize*meanY*meanY; 59 covMat21 = covMat12; 60 61 if(covMat11<1e-12) { 62 nx = 1.0; 63 ny = 0.0; 64 } 65 else { //lamda1 is the largest eigen-value of the covariance matrix 66 //and is used to compute the eigne-vector corresponding to the smallest 67 //eigenvalue, which isn‘t computed explicitly. 68 double lamda1 = (covMat11 + covMat22 + sqrt((covMat11-covMat22)*(covMat11-covMat22) + 4*covMat12*covMat12)) / 2.0; 69 nx = -covMat12; 70 ny = lamda1 - covMat22; 71 norm = sqrt(nx*nx + ny*ny); 72 nx/=norm; 73 ny/=norm; 74 } 75 parameters.push_back(nx); 76 parameters.push_back(ny); 77 parameters.push_back(meanX); 78 parameters.push_back(meanY); 79 } 80 /*****************************************************************************/ 81 /* 82 * Given the line parameters [n_x,n_y,a_x,a_y] check if 83 * [n_x, n_y] dot [data.x-a_x, data.y-a_y] < m_delta 84 * 通过与已知法线的点乘结果,确定待测点与已知直线的匹配程度;结果越小则越符合,为 85 * 零则表明点在直线上 86 */ 87 bool LineParamEstimator::agree(std::vector<double> ¶meters, Point2D &data) 88 { 89 double signedDistance = parameters[0]*(data.x-parameters[2]) + parameters[1]*(data.y-parameters[3]); 90 return ((signedDistance*signedDistance) < m_deltaSquared); 91 }
RANSAC寻找匹配的代码如下:
1 /*****************************************************************************/ 2 template<class T, class S> 3 double Ransac<T,S>::compute(std::vector<S> ¶meters, 4 ParameterEsitmator<T,S> *paramEstimator , 5 std::vector<T> &data, 6 int numForEstimate) 7 { 8 std::vector<T *> leastSquaresEstimateData; 9 int numDataObjects = data.size(); 10 int numVotesForBest = -1; 11 int *arr = new int[numForEstimate];// numForEstimate表示拟合模型所需要的最少点数,对本例的直线来说,该值为2 12 short *curVotes = new short[numDataObjects]; //one if data[i] agrees with the current model, otherwise zero 13 short *bestVotes = new short[numDataObjects]; //one if data[i] agrees with the best model, otherwise zero 14 15 16 //there are less data objects than the minimum required for an exact fit 17 if(numDataObjects < numForEstimate) 18 return 0; 19 // 计算所有可能的直线,寻找其中误差最小的解。对于100点的直线拟合来说,大约需要100*99*0.5=4950次运算,复杂度无疑是庞大的。一般采用随机选取子集的方式。 20 computeAllChoices(paramEstimator,data,numForEstimate, 21 bestVotes, curVotes, numVotesForBest, 0, data.size(), numForEstimate, 0, arr); 22 23 //compute the least squares estimate using the largest sub set 24 for(int j=0; j<numDataObjects; j++) { 25 if(bestVotes[j]) 26 leastSquaresEstimateData.push_back(&(data[j])); 27 } 28 // 对局内点再次用最小二乘法拟合出模型 29 paramEstimator->leastSquaresEstimate(leastSquaresEstimateData,parameters); 30 31 delete [] arr; 32 delete [] bestVotes; 33 delete [] curVotes; 34 35 return (double)leastSquaresEstimateData.size()/(double)numDataObjects; 36 }
参考:http://grunt1223.iteye.com/blog/961063
http://www.cnblogs.com/xrwang/archive/2011/03/09/ransac-1.html
标签:get his methods sse 情况 any rman load double
原文地址:http://www.cnblogs.com/zl1991/p/7509363.html