标签:包括 尺度 alt 下采样 计算 有一个 targe 描述 底部
上一节主要是介绍LSD算法理论,这节主要是介绍LBD算法。
1.尺度空间中提取线段
为了克服在线检测碎片问题和提高大尺度变化的性能,我们的检测框架采用由对原始图像进行搞死下采样( with a set of 尺度因子and 高斯模糊 )的尺度空间金字塔组成(N层图像)。我们首先用Edline算法每层的尺度空间产生一组线。每一条直线都有一个方向,它是由从直线左边到右边的大部分边缘像素的梯度构成的。然后通过在尺度空间中找到对应的直线来组织它们。在尺度空间中所有的线,他们被分配一个唯一的ID,如果图像中他们相关相同的事件(即同一区域的图像具有相同的方向),将其存储在一个称为LineVecs的向量。线检测方法通过重新组织所有的线段提取尺度空间形成LineVecs,从而降低了图匹配问题的维数。最终提取的结果是一组linevecs如下图:
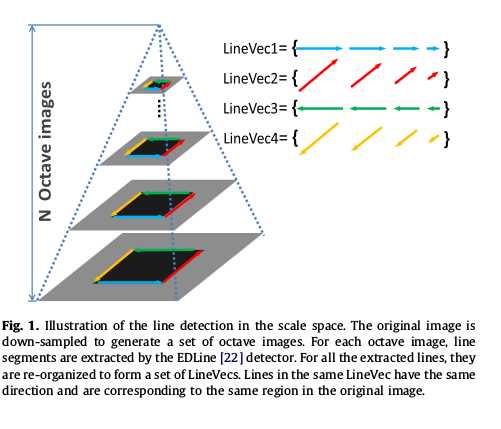
如图1所示,每个Linevec可能包括在尺度空间的多条线。为描述一个LineVec局部外观,对于每条线,我们会在被提取的线段的每层图中产生一种线描述符。
2.条带(Band)来表示线的支持域
提出这种新的线描述符的主要原因是要比MSLD更有效地描述线条的局部外观并且不失匹配性能。
每条条带的描述子BDj:通过其最近的两相邻行的条带Bj-1 ; Bj+1来计算 。特别是,在顶部和底部的条带带B1和Bm在LSR之外,在计算B1和Bm的描述时不会被考虑在内。
(the Line Band Descriptor) LBD:![]()
BDj的计算:
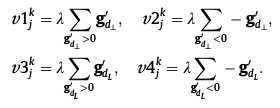
k:表示在条带Bj或是其另据的第k行,我们累积的像素的梯度在这行。
 :高斯权重
:高斯权重
the band description matrix (BDM):
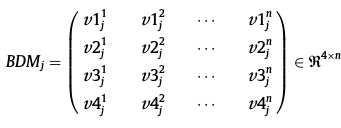
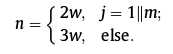
BDj由BDMj矩阵的均值向量Mj and标准方差 Sj 得到:
LBD的均值部分和标准方差部分由于其大小不同,分别进行规范化处理。此外,为减少非线性光照变化的影响,对LBD每个维度的进行抑制,它是小于一个阈值(经验:0.4的是一个很好的值)。最后,我们重新规范约束向量得到单元的LBD。
标签:包括 尺度 alt 下采样 计算 有一个 targe 描述 底部
原文地址:http://www.cnblogs.com/Jessica-jie/p/7523364.html