#include "stdafx.h"
#include <iostream>
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/calib3d/calib3d.hpp>
using namespace std;
using namespace cv;
int _tmain(int argc, _TCHAR* argv[])
{
Mat src = imread("Lena.jpg");
src.convertTo(src,CV_32F,1.0/255);
imshow("src",src);
Mat src2= src.clone();
Mat dst;
Mat lastmat;
vector<Mat> vecMats;
Mat tmp;
for (int i=0;i<4;i++)
{
pyrDown(src2,src2);
pyrUp(src2,tmp);
resize(tmp,tmp,src.size());
tmp = src - tmp;
vecMats.push_back(tmp);
src = src2;
}
lastmat = src;
//重建
for (int i=3;i>=0;i--)
{
pyrUp(lastmat,lastmat);
resize(lastmat,lastmat,vecMats[i].size());
lastmat = lastmat + vecMats[i];
}
imshow("dst",lastmat);
waitKey();
return 0;
}
使用工具比对也是完全一样的
二、实现每个金字塔层面的linearblend融合
#include "stdafx.h"
#include <iostream>
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/calib3d/calib3d.hpp>
using namespace std;
using namespace cv;
int _tmain(int argc, _TCHAR* argv[])
{
Mat srcLeft = imread("apple.png");
Mat srcRight= imread("orange.png");
srcLeft.convertTo(srcLeft,CV_32F,1.0/255);
srcRight.convertTo(srcRight,CV_32F,1.0/255);
Mat rawLeft = srcLeft.clone();
Mat rawRight=srcRight.clone();
imshow("srcRight",srcRight);
imshow("srcLeft",srcLeft);
Mat srcLeft2= srcLeft.clone();
Mat srcRight2=srcRight.clone();
Mat lastmatLeft; Mat lastmatRight;
vector<Mat> vecMatsLeft; vector<Mat> vecMatsRight;
Mat tmp;
for (int i=0;i<4;i++)
{
pyrDown(srcLeft2,srcLeft2);
pyrUp(srcLeft2,tmp);
resize(tmp,tmp,srcLeft.size());
tmp = srcLeft - tmp;
vecMatsLeft.push_back(tmp);
srcLeft = srcLeft2;
}
lastmatLeft = srcLeft;
for (int i=0;i<4;i++)
{
pyrDown(srcRight2,srcRight2);
pyrUp(srcRight2,tmp);
resize(tmp,tmp,srcRight.size());
tmp = srcRight - tmp;
vecMatsRight.push_back(tmp);
srcRight = srcRight2;
}
lastmatRight = srcRight;
//每一层都要对准并融合
int ioffset =vecMatsLeft[0].cols - 100;//这里-100 的操作是linearblend的小技巧
int istep = 1;
double dblend = 0.0;
vector<Mat> vecMatResult;//保存结果
Mat tmpResult;
Mat roi;
for (int i=0;i<4;i++)
{
//对准
tmpResult = Mat::zeros(vecMatsLeft[i].rows,vecMatsLeft[i].cols*2,vecMatsLeft[i].type());
roi = tmpResult(Rect(ioffset,0,vecMatsLeft[i].cols,vecMatsLeft[i].rows));
vecMatsRight[i].copyTo(roi);
roi = tmpResult(Rect(0,0,vecMatsLeft[i].cols,vecMatsLeft[i].rows));
vecMatsLeft[i].copyTo(roi);
//融合
for (int j = 0;j<(100/istep);j++)
{
tmpResult.col(ioffset + j)= tmpResult.col(ioffset+j)*(1-dblend) + vecMatsRight[i].col(j)*dblend;
dblend = dblend +0.01*istep;
}
//结尾
dblend = 0.0;
ioffset = ioffset/2;
istep = istep*2;
vecMatResult.push_back(tmpResult);
}
Mat latmatresult = Mat::zeros(lastmatLeft.rows,lastmatLeft.cols*2,lastmatLeft.type());
roi = latmatresult(Rect(0,0,lastmatLeft.cols,lastmatLeft.rows));
lastmatLeft.copyTo(roi);
roi = latmatresult(Rect(ioffset,0,lastmatLeft.cols,lastmatLeft.rows));
lastmatRight.copyTo(roi);
for (int j=0;j<(100/istep);j++)
{
latmatresult.col(ioffset + j)= latmatresult.col(ioffset+j)*(1-dblend) + lastmatRight.col(j)*dblend;
dblend = dblend +0.01*istep;
}
//重构
for (int i=3;i>=0;i--)
{
pyrUp(lastmatLeft,lastmatLeft);
resize(lastmatLeft,lastmatLeft,vecMatsLeft[i].size());
lastmatLeft = lastmatLeft + vecMatsLeft[i];
}
for (int i=3;i>=0;i--)
{
pyrUp(lastmatRight,lastmatRight);
resize(lastmatRight,lastmatRight,vecMatsRight[i].size());
lastmatRight = lastmatRight + vecMatsRight[i];
}
for (int i=3;i>=0;i--)
{
pyrUp(latmatresult,latmatresult);
resize(latmatresult,latmatresult,vecMatResult[i].size());
latmatresult = latmatresult + vecMatResult[i];
}
imshow("lastmatLeft",lastmatLeft);
lastmatLeft.convertTo(lastmatLeft,CV_8U,255);
imwrite("lastmatleft.png",lastmatLeft);
imshow("lastmatRight",lastmatRight);
imshow("multibandblend",latmatresult);
waitKey();
return 0;
}
观看细节,可以看到过渡的地方一点都不违和,苹果上面的白色小斑点都过渡了过来。这个结果应该是非常接近论文上面的要求了。
三、改造现有的图像拼接程序,并且运用于图像拼接
//使用Multiblend进行图像融合
#include "stdafx.h"
#include <iostream>
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include "matcher.h"
using namespace cv;
int main()
{
// Read input images 这里的命名最好为imageleft和imageright
cv::Mat image1= cv::imread("Univ4.jpg",1);
cv::Mat image2= cv::imread("Univ5.jpg",1);
if (!image1.data || !image2.data)
return 0;
// Prepare the matcher
RobustMatcher rmatcher;
rmatcher.setConfidenceLevel(0.98);
rmatcher.setMinDistanceToEpipolar(1.0);
rmatcher.setRatio(0.65f);
cv::Ptr<cv::FeatureDetector> pfd= new cv::SurfFeatureDetector(10);
rmatcher.setFeatureDetector(pfd);
// Match the two images
std::vector<cv::DMatch> matches;
std::vector<cv::KeyPoint> keypoints1, keypoints2;
cv::Mat fundemental= rmatcher.match(image1,image2,matches, keypoints1, keypoints2);
// draw the matches
cv::Mat imageMatches;
cv::drawMatches(image1,keypoints1, // 1st image and its keypoints
image2,keypoints2, // 2nd image and its keypoints
matches, // the matches
imageMatches, // the image produced
cv::Scalar(255,255,255)); // color of the lines
// Convert keypoints into Point2f
std::vector<cv::Point2f> points1, points2;
for (std::vector<cv::DMatch>::const_iterator it= matches.begin();
it!= matches.end(); ++it) {
// Get the position of left keypoints
float x= keypoints1[it->queryIdx].pt.x;
float y= keypoints1[it->queryIdx].pt.y;
points1.push_back(cv::Point2f(x,y));
// Get the position of right keypoints
x= keypoints2[it->trainIdx].pt.x;
y= keypoints2[it->trainIdx].pt.y;
points2.push_back(cv::Point2f(x,y));
}
std::cout << points1.size() << " " << points2.size() << std::endl;
// Find the homography between image 1 and image 2
std::vector<uchar> inliers(points1.size(),0);
cv::Mat homography= cv::findHomography(
cv::Mat(points1),cv::Mat(points2), // corresponding points
inliers, // outputed inliers matches
CV_RANSAC, // RANSAC method
1.); // max distance to reprojection point
// Warp image 1 to image 2
cv::Mat result;
cv::warpPerspective(image1, // input image
result, // output image
homography, // homography
cv::Size(2*image1.cols,image1.rows)); // size of output image
cv::Mat resultback;
result.copyTo(resultback);
// Copy image 1 on the first half of full image
cv::Mat half(result,cv::Rect(0,0,image2.cols,image2.rows));
image2.copyTo(half);
// Display the warp image
cv::namedWindow("After warping");
cv::imshow("After warping",result);
//需要注意的一点是,原始文件的图片是按照从右至左边进行移动的。
//进行Multiblend的融合,融合的输入图像为image2(左)和resultback(右)
Mat srcLeft = image2.clone();
Mat srcRight= resultback.clone();
srcLeft.convertTo(srcLeft,CV_32F,1.0/255);
srcRight.convertTo(srcRight,CV_32F,1.0/255);
Mat rawLeft = srcLeft.clone();
Mat rawRight=srcRight.clone();
Mat srcLeft2= srcLeft.clone();
Mat srcRight2=srcRight.clone();
Mat lastmatLeft; Mat lastmatRight;
vector<Mat> vecMatsLeft; vector<Mat> vecMatsRight;
Mat tmp;
for (int i=0;i<4;i++)
{
pyrDown(srcLeft2,srcLeft2);
pyrUp(srcLeft2,tmp);
resize(tmp,tmp,srcLeft.size());
tmp = srcLeft - tmp;
vecMatsLeft.push_back(tmp);
srcLeft = srcLeft2;
}
lastmatLeft = srcLeft;
for (int i=0;i<4;i++)
{
pyrDown(srcRight2,srcRight2);
pyrUp(srcRight2,tmp);
resize(tmp,tmp,srcRight.size());
tmp = srcRight - tmp;
vecMatsRight.push_back(tmp);
srcRight = srcRight2;
}
lastmatRight = srcRight;
//每一层都要对准并融合
int ioffset =vecMatsLeft[0].cols - 100;//这里-100 的操作是linearblend的小技巧
int istep = 1;
double dblend = 0.0;
vector<Mat> vecMatResult;//保存结果
Mat tmpResult;
Mat roi;
for (int i=0;i<4;i++)
{
//对准
tmpResult = Mat::zeros(vecMatsLeft[i].rows,vecMatsLeft[i].cols*2,vecMatsLeft[i].type());
roi = tmpResult(Rect(0,0,vecMatsRight[i].cols,vecMatsRight[i].rows));
vecMatsRight[i].copyTo(roi);
roi = tmpResult(Rect(0,0,vecMatsLeft[i].cols,vecMatsLeft[i].rows));
vecMatsLeft[i].copyTo(roi);
//融合
for (int j = 0;j<(128/istep);j++)
{
tmpResult.col(ioffset + j)= tmpResult.col(ioffset+j)*(1-dblend) + vecMatsRight[i].col(ioffset+j)*dblend;
dblend = dblend +0.0078125*istep;
}
//结尾
dblend = 0.0;
ioffset = ioffset/2;
istep = istep*2;
vecMatResult.push_back(tmpResult);
}
Mat latmatresult = Mat::zeros(lastmatLeft.rows,lastmatLeft.cols*2,lastmatLeft.type());
roi = latmatresult(Rect(0,0,lastmatRight.cols,lastmatRight.rows));
lastmatRight.copyTo(roi);
roi = latmatresult(Rect(0,0,lastmatLeft.cols,lastmatLeft.rows));
lastmatLeft.copyTo(roi);
for (int j=0;j<(128/istep);j++)
{
latmatresult.col(ioffset+j)= latmatresult.col(ioffset+j)*(1-dblend) + lastmatRight.col(ioffset+j)*dblend;
dblend = dblend +0.00725*istep;
}
//重构
for (int i=3;i>=0;i--)
{
pyrUp(lastmatLeft,lastmatLeft);
resize(lastmatLeft,lastmatLeft,vecMatsLeft[i].size());
lastmatLeft = lastmatLeft + vecMatsLeft[i];
}
for (int i=3;i>=0;i--)
{
pyrUp(lastmatRight,lastmatRight);
resize(lastmatRight,lastmatRight,vecMatsRight[i].size());
lastmatRight = lastmatRight + vecMatsRight[i];
}
for (int i=3;i>=0;i--)
{
pyrUp(latmatresult,latmatresult);
resize(latmatresult,latmatresult,vecMatResult[i].size());
latmatresult = latmatresult + vecMatResult[i];
}
cv::waitKey();
return 0;
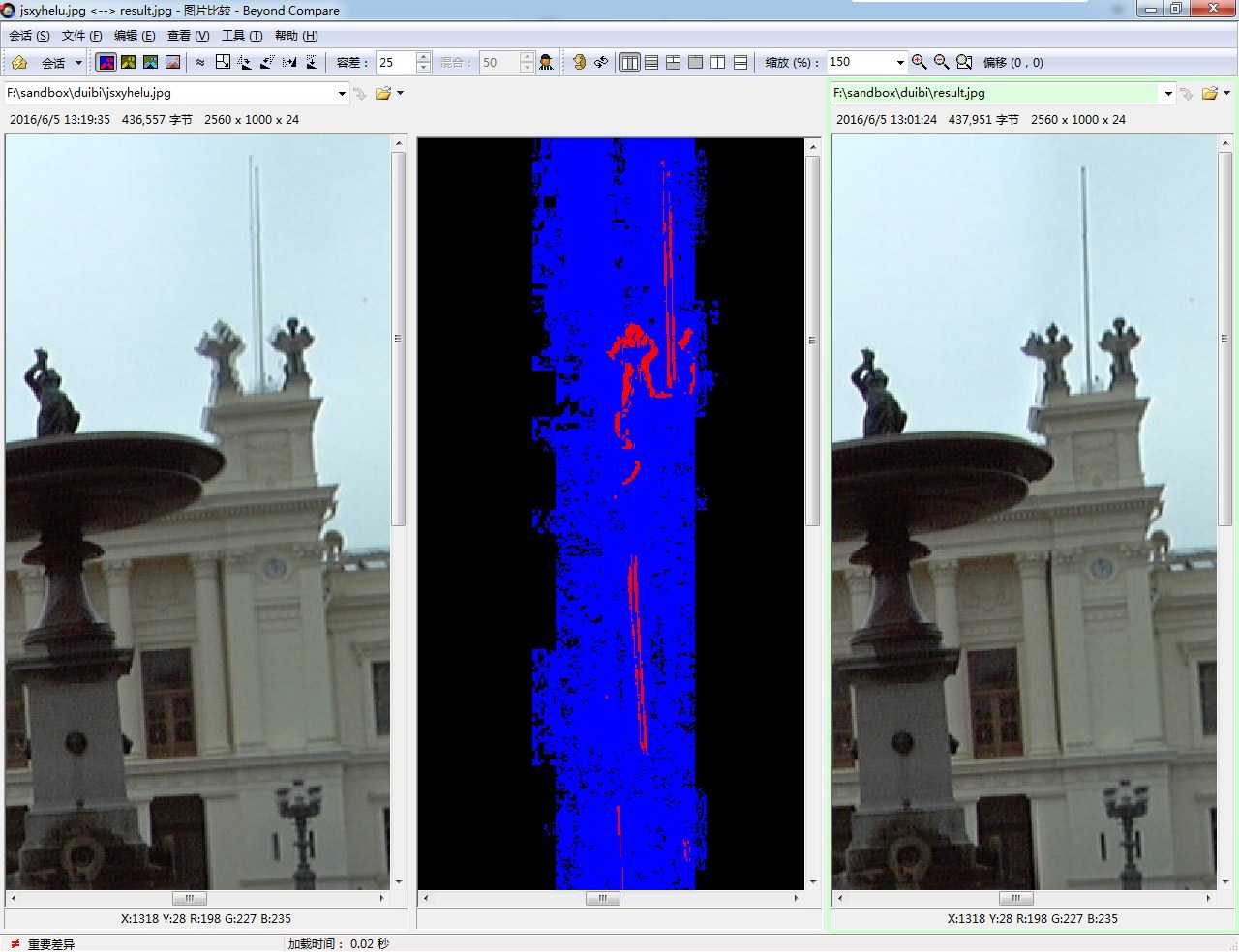
}可以看到纹理过渡不违和,但是光照变化剧烈
四、改造现有代码
上文提及了已经实现的代码,这个代码写的还是相当不错的,其原理完全按照《a multivesolution spline with application to image mosaics 》来实现,为了应用于实际的图像拼接,做了一些修改
//使用Multiblend进行图像融合
//代码重构
#include "stdafx.h"
#include <iostream>
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include "matcher.h"
using namespace cv;
class LaplacianBlending {
private:
Mat_<Vec3f> top;
Mat_<Vec3f> down;
Mat_<float> blendMask;
vector<Mat_<Vec3f> > topLapPyr,downLapPyr,resultLapPyr;//Laplacian Pyramids
Mat topHighestLevel, downHighestLevel, resultHighestLevel;
vector<Mat_<Vec3f> > maskGaussianPyramid; //masks are 3-channels for easier multiplication with RGB
int levels;
//创建金字塔
void buildPyramids() {
//参数的解释 top就是top ,topLapPyr就是top的laplacian的pyr,而topHighestLevel保存的是最高端的高斯金字塔
buildLaplacianPyramid(top,topLapPyr,topHighestLevel);
buildLaplacianPyramid(down,downLapPyr,downHighestLevel);
buildGaussianPyramid();
}
//创建gauss金字塔
void buildGaussianPyramid() {//金字塔内容为每一层的掩模
assert(topLapPyr.size()>0);
maskGaussianPyramid.clear();
Mat currentImg;
//blendMask就是结果所在
cvtColor(blendMask, currentImg, CV_GRAY2BGR);//store color img of blend mask into maskGaussianPyramid
maskGaussianPyramid.push_back(currentImg); //0-level
currentImg = blendMask;
for (int l=1; l<levels+1; l++) {
Mat _down;
if (topLapPyr.size() > l)
pyrDown(currentImg, _down, topLapPyr[l].size());
else
pyrDown(currentImg, _down, topHighestLevel.size()); //lowest level
Mat down;
cvtColor(_down, down, CV_GRAY2BGR);
maskGaussianPyramid.push_back(down);//add color blend mask into mask Pyramid
currentImg = _down;
}
}
//创建laplacian金字塔
void buildLaplacianPyramid(const Mat& img, vector<Mat_<Vec3f> >& lapPyr, Mat& HighestLevel) {
lapPyr.clear();
Mat currentImg = img;
for (int l=0; l<levels; l++) {
Mat down,up;
pyrDown(currentImg, down);
pyrUp(down, up,currentImg.size());
Mat lap = currentImg - up; //存储的就是残差
lapPyr.push_back(lap);
currentImg = down;
}
currentImg.copyTo(HighestLevel);
}
Mat_<Vec3f> reconstructImgFromLapPyramid() {
//将左右laplacian图像拼成的resultLapPyr金字塔中每一层
//从上到下插值放大并相加,即得blend图像结果
Mat currentImg = resultHighestLevel;
for (int l=levels-1; l>=0; l--) {
Mat up;
pyrUp(currentImg, up, resultLapPyr[l].size());
currentImg = up + resultLapPyr[l];
}
return currentImg;
}
void blendLapPyrs() {
//获得每层金字塔中直接用左右两图Laplacian变换拼成的图像resultLapPyr
resultHighestLevel = topHighestLevel.mul(maskGaussianPyramid.back()) +
downHighestLevel.mul(Scalar(1.0,1.0,1.0) - maskGaussianPyramid.back());
for (int l=0; l<levels; l++) {
Mat A = topLapPyr[l].mul(maskGaussianPyramid[l]);
Mat antiMask = Scalar(1.0,1.0,1.0) - maskGaussianPyramid[l];
Mat B = downLapPyr[l].mul(antiMask);
Mat_<Vec3f> blendedLevel = A + B;
resultLapPyr.push_back(blendedLevel);
}
}
public:
LaplacianBlending(const Mat_<Vec3f>& _top, const Mat_<Vec3f>& _down, const Mat_<float>& _blendMask, int _levels)://缺省数据,使用 LaplacianBlending lb(l,r,m,4);
top(_top),down(_down),blendMask(_blendMask),levels(_levels)
{
assert(_top.size() == _down.size());
assert(_top.size() == _blendMask.size());
buildPyramids(); //创建laplacian金字塔和gauss金字塔
blendLapPyrs(); //将左右金字塔融合成为一个图片
};
Mat_<Vec3f> blend() {
return reconstructImgFromLapPyramid();//reconstruct Image from Laplacian Pyramid
}
};
Mat_<Vec3f> LaplacianBlend(const Mat_<Vec3f>& t, const Mat_<Vec3f>& d, const Mat_<float>& m) {
LaplacianBlending lb(t,d,m,4);
return lb.blend();
}
int main()
{
// Read input images 这里的命名最好为imageleft和imageright
cv::Mat image1= cv::imread("Univ3.jpg",1);
cv::Mat image2= cv::imread("Univ4.jpg",1);
if (!image1.data || !image2.data)
return 0;
// Prepare the matcher
RobustMatcher rmatcher;
rmatcher.setConfidenceLevel(0.98);
rmatcher.setMinDistanceToEpipolar(1.0);
rmatcher.setRatio(0.65f);
cv::Ptr<cv::FeatureDetector> pfd= new cv::SurfFeatureDetector(10);
rmatcher.setFeatureDetector(pfd);
// Match the two images
std::vector<cv::DMatch> matches;
std::vector<cv::KeyPoint> keypoints1, keypoints2;
cv::Mat fundemental= rmatcher.match(image1,image2,matches, keypoints1, keypoints2);
// draw the matches
cv::Mat imageMatches;
cv::drawMatches(image1,keypoints1, // 1st image and its keypoints
image2,keypoints2, // 2nd image and its keypoints
matches, // the matches
imageMatches, // the image produced
cv::Scalar(255,255,255)); // color of the lines
// Convert keypoints into Point2f
std::vector<cv::Point2f> points1, points2;
for (std::vector<cv::DMatch>::const_iterator it= matches.begin();
it!= matches.end(); ++it) {
// Get the position of left keypoints
float x= keypoints1[it->queryIdx].pt.x;
float y= keypoints1[it->queryIdx].pt.y;
points1.push_back(cv::Point2f(x,y));
// Get the position of right keypoints
x= keypoints2[it->trainIdx].pt.x;
y= keypoints2[it->trainIdx].pt.y;
points2.push_back(cv::Point2f(x,y));
}
std::cout << points1.size() << " " << points2.size() << std::endl;
// Find the homography between image 1 and image 2
std::vector<uchar> inliers(points1.size(),0);
cv::Mat homography= cv::findHomography(
cv::Mat(points1),cv::Mat(points2), // corresponding points
inliers, // outputed inliers matches
CV_RANSAC, // RANSAC method
1.); // max distance to reprojection point
// Warp image 1 to image 2
cv::Mat result;
cv::warpPerspective(image1, // input image
result, // output image
homography, // homography
cv::Size(2*image1.cols,image1.rows)); // size of output image
cv::Mat resultback;
result.copyTo(resultback);
// Copy image 1 on the first half of full image
cv::Mat half(result,cv::Rect(0,0,image2.cols,image2.rows));
image2.copyTo(half);
// Display the warp image
cv::namedWindow("After warping");
cv::imshow("After warping",result);
//需要注意的一点是,原始文件的图片是按照从右至左边进行移动的。
//进行Multiblend的融合,融合的输入图像为image2(左)和resultback(右)
Mat srcLeft = image2.clone();
Mat srcRight= resultback.clone();
int ioffset = srcLeft.cols -100;
Mat imageL = srcLeft(Rect(ioffset,0,100,srcLeft.rows)).clone();
Mat imageR = srcRight(Rect(ioffset,0,100,srcLeft.rows)).clone();
Mat_<Vec3f> t; imageL.convertTo(t,CV_32F,1.0/255.0);//Vec3f表示有三个通道,即 l[row][column][depth]
Mat_<Vec3f> d; imageR.convertTo(d,CV_32F,1.0/255.0);
Mat_<float> m(t.rows,d.cols,0.0); //将m全部赋值为0
m(Range::all(),Range(0,m.cols/2)) = 1.0; //取m全部行&[0,m.cols/2]列,赋值为1.0
Mat_<Vec3f> matblend = LaplacianBlend(t,d, m);
Mat re;
matblend.convertTo(re,CV_8UC3,255);
Mat roi = srcLeft(Rect(ioffset,0,100,srcLeft.rows));
re.copyTo(roi);
roi = resultback(Rect(0,0,srcLeft.cols,srcLeft.rows));
srcLeft.copyTo(roi);
cv::waitKey();
return 0;
}五、结果比较
我写的multibandblend
liner
multibendblend
六、小结
应该说我采用的算法,虽然也有一定程度上效果,但是“鬼影”并没有减少。采用linearblend的方法,不管分不分金字塔,都是“鬼影”产生的原因。研究问题,还是应该读原始论文,找到好的代码,真正地解决问题。
这个论文背后的原理是什么?
这个代码是谁写的,来自哪里?
搞明白这些问题。