标签:hit base http diff rip driving baseline Plan rom
In the previous quizzes, you designed a cost function to choose a lane when trying to reach a goal in highway driving:
Here, Δ was the lateral distance between the goal lane and the final chosen lane, and Δ was the longitudinal distance from the vehicle to the goal.
In this quiz, we‘d like you to implement the cost function in C++, but with one important change. The finite state machine we use for vehicle behavior also includes states for planning a lane change right or left (PLCR or PLCL), and the cost function should incorporate this information. We will provide the following four inputs to the function:
Your task in the implementation will be to modify Δd in the equation above so that it satisifes:
You can implement your solution in cost.cpp below.
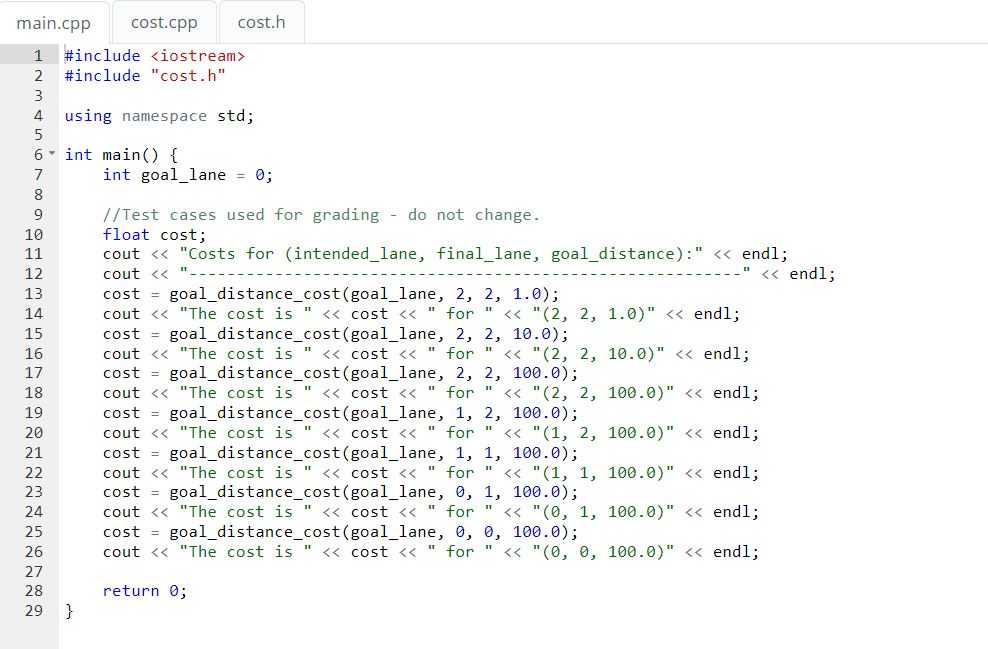
cost.cpp
float goal_distance_cost(int goal_lane, int intended_lane, int final_lane, float distance_to_goal) { /* The cost increases with both the distance of intended lane from the goal and the distance of the final lane from the goal. The cost of being out of the goal lane also becomes larger as vehicle approaches the goal. */ int delta_d = 2.0*goal_lane - intended_lane - final_lane; float cost = 1 - exp(-(abs(delta_d) / distance_to_goal)); return cost; }
behavior planning——13. implement a cost function in C++
标签:hit base http diff rip driving baseline Plan rom
原文地址:https://www.cnblogs.com/fuhang/p/8984638.html