标签:write details sed 向量 表示 连接 core 否则 文章
原文链接:https://blog.csdn.net/qq_25352981/article/details/46914837#commentsedit
本文目标是通过使用SIFT和RANSAC算法,完成特征点的正确匹配,并求出变换矩阵,通过变换矩阵计算出要识别物体的边界(文章中有部分源码,整个工程我也上传了,请点击这里)。
SIFT算法是目前公认的效果最好的特征点检测算法,关于该算法的就不多说了,网上的资料有很多,在此提供两个链接,一个是SIFT原文的译文,一个是关于SIFT算法的详细解释:
整个实现过程可以复述如下:提供两张初始图片,一幅为模板图像,一幅为测试图片,目的就是根据模板图片中的物体,检测出测试图片中的物体,并表示出物体的具体位置和大小,测试图片中的物体位置和大小,已经事先用白色方框标记。
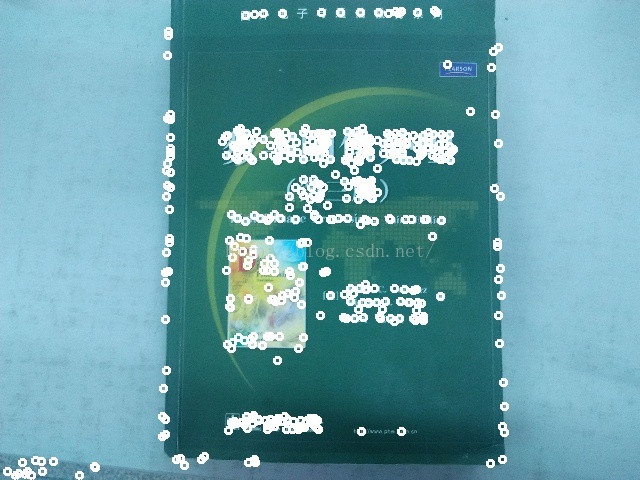
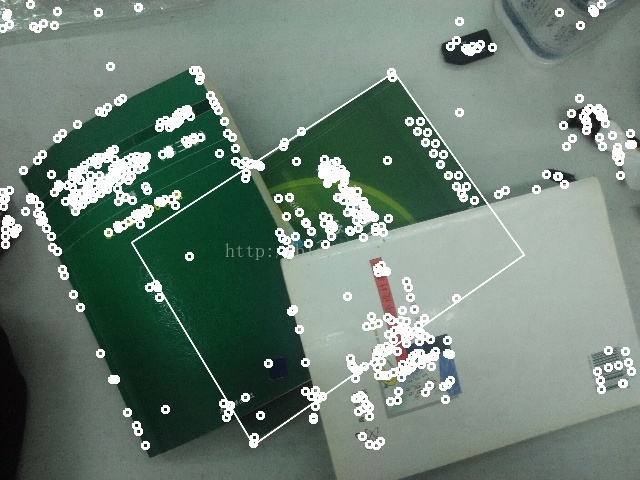
首先,对两幅图片,都使用SIFT算法提取特征点,提取结果如下:(SIFT特征提取方法就用的是上文链接“SIFT算法详解”中提供的代码)
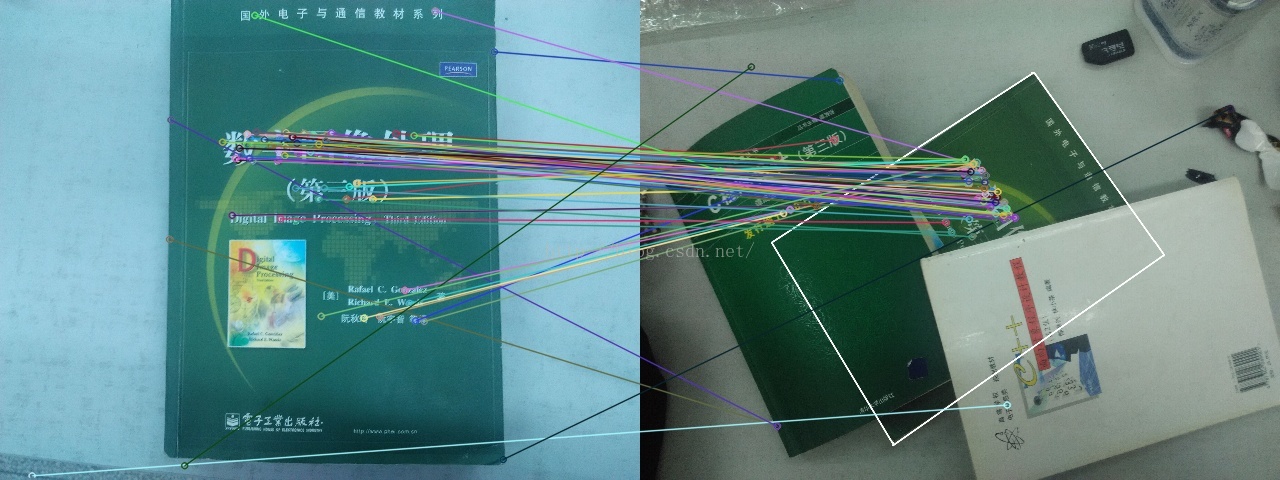
然后对特征点进行匹配,按照SIFT算法原文作者的思路,每个特征点产生一个128维的向量,计算向量之间的欧式距离,采用最近比次近的方式完成匹配,如果最近距离比上次近距离小于0.8,则认为这是一个正确的匹配, 否则认为匹配不成功。结果这种匹配后的情况如下图:
可以发现,仍然存在着很多错误的匹配点,所以再尝试用RANSAC算法消除错误匹配,尝试使用openCV中的findFundamentalMat函数消除错误匹配:
通过使用findFundamentalMat函数,函数返回一个3*3的矩阵,一开始我认为这个矩阵就是变换矩阵,只要将左图中的点与这个变换矩阵相乘,就可以得到右图中的对应点。但是这其实是不对的。
在这里有一个误解,就是findFundamentalMat函数确实可以使用RANSAC方法消除错误匹配,从名字上可以发现,这个函数的作用是返回基础矩阵的,基础矩阵和变换矩阵是两个不同的概念。基础矩阵描述是三维场景中的像点之间的对应关系(其实到现在为止这个函数求出的基础矩阵有个毛用我也不知道)。所以说,如果使用这个函数,这个实验也就能做到这一步了,没法再往下做了。
所以,为了得到变换矩阵,后来我才发现openCV中还有函数findHomography,这个函数才是真正的计算变换矩阵的函数,它的函数返回值才是真正的变换矩阵。
其实这个问题困扰了我很久,关于消除错误匹配的方法,网上查出来的多数都是通过findFundamentalMat函数来进行,所以我就想当然的认为该函数的返回值是变换矩阵了。而网上关于findHomography的介绍比较少,所以才会让人们误解findFundamentalMat会计算出变换矩阵了。
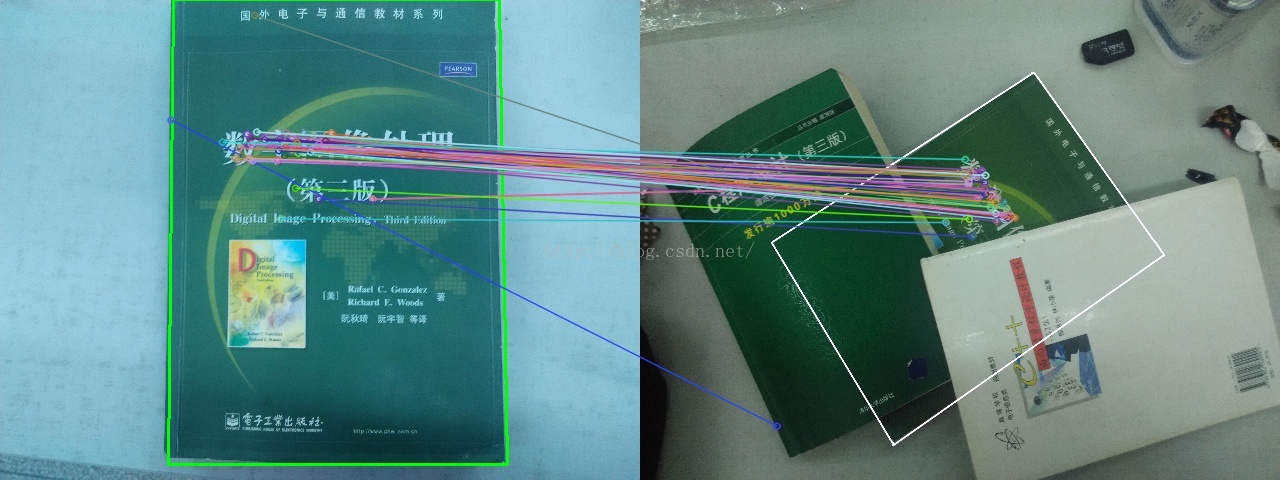
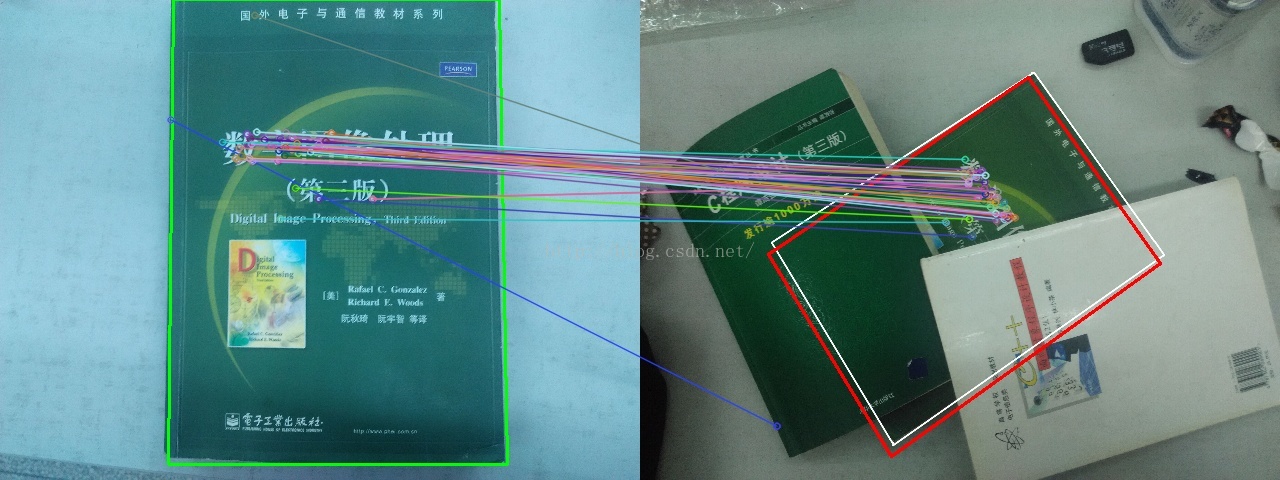
尝试用findHomography函数返回的矩阵,在模板图像中,已经用绿色方框标示出物体轮廓,根据物体的四个边界点,与变换矩阵相乘,即可得到变换后的物体的轮廓的四个边界点,将此边界点连接即为物体轮廓,如下图所示(绿色方框为事先标注的模板物体中的轮廓,白色方框为事先标注的测试图片中的轮廓,红色方框为经过绿色方框经变换矩阵变换后计算出的轮廓):
从结果可以看出,这才是比较正确的结果。
实验过程中的主要代码如下(这是主要的代码,SIFT算法和一些其他的功能函数我都写在了其他的文件中):
#include<math.h>
#include<time.h>
#include <windows.h>
#include <iostream>
using namespace std;
#include <cv.h>
#include <highgui.h>
#include <cxcore.h>
using namespace cv;
#include "sift.h"
#include "my_function.h"
int main()
{
//加载两幅图片
Mat src1 = imread("F:\\ylab\\image database\\camera\\obj01_001.jpg");
Mat src2 = imread("F:\\ylab\\image database\\imagesTest2\\test01_.jpg");
//这四个坐标是模板图像中绿色方框的四个顶点
Point2f m1(173.0,0.0),m2(168.0,464.0),m3(507.0,464.0),m4(499.0,0.0);
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(173.0,0.0);
obj_corners[1] = cvPoint(168.0,464.0);
obj_corners[2] = cvPoint(507.0,464.0);
obj_corners[3] = cvPoint(499.0,0.0);
//原始图片比较大,我这里将图片同一处理成了640*480的大小
Size certainsize=Size(640,480);
Mat src_1;
Mat src_2;
resize(src1,src_1,certainsize);
resize(src2,src_2,certainsize);
//两个图像的特征点序列
Vector<Keypoint> feature_1,feature_2;
//采用sift算法,计算特征点序列,这个SIFT函数是在另外的文件中写好的
Sift(src_1, feature_1, 1.6);
Sift(src_2, feature_2, 1.6);
//feature_dis为带有距离的特征点结构体序列
Vector<Key_point> feature_dis_1;
Vector<Key_point> feature_dis_2;
Vector<Key_point> result;
//对特征点进行匹配,这个Match_feature是我自己写的,就是采用最近比次近小于0.8即为合适的匹配,这种匹配方式
//openCV中并没有,所以我就自己写了
Match_feature(feature_1,feature_2,feature_dis_1,feature_dis_2);
printf("The number of features is %d\n",feature_1.size());
printf("The number of the match features is %d\n",feature_dis_1.size());
//从这里开始使用RANSAC方法进行运算
//下面的程序都好无奈,所有的结构都只能转化成openCV的类型才能用openCV的函数。。
Ptr<DescriptorMatcher> descriptor_matcher = DescriptorMatcher::create( "BruteForce" );//创建特征匹配器
int count=feature_dis_1.size();
//把特征点序列转化成openCV能够使用的类型
vector<KeyPoint>keypoints1,keypoints2;
KeyPoint keyp;
for(int i=0;i<count;i++)
{
keyp.pt.x=feature_dis_1[i].dx;
keyp.pt.y=feature_dis_1[i].dy;
keypoints1.push_back(keyp);
keyp.pt.x=feature_dis_2[i].dx;
keyp.pt.y=feature_dis_2[i].dy;
keypoints2.push_back(keyp);
}
Mat descriptors1(count,FEATURE_ELEMENT_LENGTH, CV_32F);
Mat descriptors2(count,FEATURE_ELEMENT_LENGTH, CV_32F);
for (int i=0; i<count; i++)
{
for(int j=0;j<FEATURE_ELEMENT_LENGTH;j++)
{
descriptors1.at<float>(i,j)=feature_dis_1[i].descriptor[j];
descriptors2.at<float>(i,j)=feature_dis_2[i].descriptor[j];
}
}
Mat img_match;
vector<DMatch> matches;
descriptor_matcher->match( descriptors1, descriptors2, matches );
Mat img_matches;
drawMatches(src_1,keypoints1,src_2,keypoints2,matches,img_matches);
//其实我前面已经完成匹配了,到这里,用openCV自带的方式重新匹配了一遍,并且显示了一下
imshow("SIFT",img_matches);
//imwrite("F:\\ylab\\CSDN_image\\3.jpg",img_matches);
Mat p1(feature_dis_1.size(),2,CV_32F);
Mat p2(feature_dis_1.size(),2,CV_32F);
for(int i=0;i<feature_dis_1.size();i++)
{
p1.at<float>(i,0)=feature_dis_1[i].dx;
p1.at<float>(i,1)=feature_dis_1[i].dy;
p2.at<float>(i,0)=feature_dis_2[i].dx;
p2.at<float>(i,1)=feature_dis_2[i].dy;
}
// 用RANSAC方法计算F
Mat m_Fundamental;
// 上面这个变量是基本矩阵
vector<uchar> m_RANSACStatus;
// 上面这个变量已经定义过,用于存储RANSAC后每个点的状态
//一开始使用findFundamentalMat函数,发现可以消除错误匹配,实现很好的效果,但是
//就是函数返回值不是变换矩阵,而是没有什么用的基础矩阵
m_Fundamental = findFundamentalMat(p1,p2,m_RANSACStatus,CV_FM_RANSAC);
//这里使用findHomography函数,这个函数的返回值才是真正的变换矩阵
Mat m_homography;
vector<uchar> m;
m_homography=findHomography(p1,p2,CV_RANSAC,3,m);
//由变换矩阵,求得变换后的物体边界四个点
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, m_homography);
line( src_2, scene_corners[0] , scene_corners[1] , Scalar(0, 0, 255), 2 );
line( src_2, scene_corners[1] , scene_corners[2] , Scalar(0, 0, 255), 2 );
line( src_2, scene_corners[2] , scene_corners[3] , Scalar(0, 0, 255), 2 );
line( src_2, scene_corners[3] , scene_corners[0] , Scalar(0, 0, 255), 2 );
int nr=m_Fundamental.rows; // number of rows
int nc=m_Fundamental.cols *m_Fundamental.channels(); // total number of elements per line
// 计算野点个数
int OutlinerCount = 0;
for (int i=0; i<Count; i++)
{
if (m_RANSACStatus[i] == 0) // 状态为0表示野点
{
OutlinerCount++;
}
}
// 计算内点
vector<Point2f> m_LeftInlier;
vector<Point2f> m_RightInlier;
vector<DMatch> m_InlierMatches;
// 上面三个变量用于保存内点和匹配关系
int ptCount = (int)matches.size();
int InlinerCount = ptCount - OutlinerCount;
m_InlierMatches.resize(InlinerCount);
m_LeftInlier.resize(InlinerCount);
m_RightInlier.resize(InlinerCount);
InlinerCount = 0;
for (int i=0; i<ptCount; i++)
{
if (m_RANSACStatus[i] != 0)
{
m_LeftInlier[InlinerCount].x = p1.at<float>(i, 0);
m_LeftInlier[InlinerCount].y = p1.at<float>(i, 1);
m_RightInlier[InlinerCount].x = p2.at<float>(i, 0);
m_RightInlier[InlinerCount].y = p2.at<float>(i, 1);
m_InlierMatches[InlinerCount].queryIdx = InlinerCount;
m_InlierMatches[InlinerCount].trainIdx = InlinerCount;
InlinerCount++;
}
}
// //printf("最终的匹配点个数为:%d\n",InlinerCount);
//// 把内点转换为drawMatches可以使用的格式
vector<KeyPoint> key1(InlinerCount);
vector<KeyPoint> key2(InlinerCount);
KeyPoint::convert(m_LeftInlier, key1);
KeyPoint::convert(m_RightInlier, key2);
// 显示计算F过后的内点匹配
//Mat m_matLeftImage;
//Mat m_matRightImage;
// 以上两个变量保存的是左右两幅图像
line(src_1,m1,m2,Scalar(0,255,0),2);
line(src_1,m2,m3,Scalar(0,255,0),2);
line(src_1,m3,m4,Scalar(0,255,0),2);
line(src_1,m4,m1,Scalar(0,255,0),2);
Mat OutImage;
drawMatches(src_1, key1, src_2, key2, m_InlierMatches, OutImage);
imshow("SIFT_RANSAC",OutImage);
//imwrite("F:\\ylab\\CSDN_image\\5.jpg",OutImage);
cvWaitKey( 0 );
return 0;
}
(转载)利用SIFT和RANSAC算法(openCV框架)实现物体的检测与定位,并求出变换矩阵(findFundamentalMat和findHomography的比较) 置顶
标签:write details sed 向量 表示 连接 core 否则 文章
原文地址:https://www.cnblogs.com/6-6-8-8/p/9040419.html