标签:nta amp 网址 文件 Oz 基于 under 微软 devkit
Object Detection API是谷歌开放的一个内部使用的物体识别系统。2016年 10月,该系统在COCO识别挑战中名列第一。它支持当前最佳的实物检测模型,能够在单个图像中定位和识别多个对象。该系统不仅用于谷歌于自身的产品和服务,还被推广至整个研究社区。
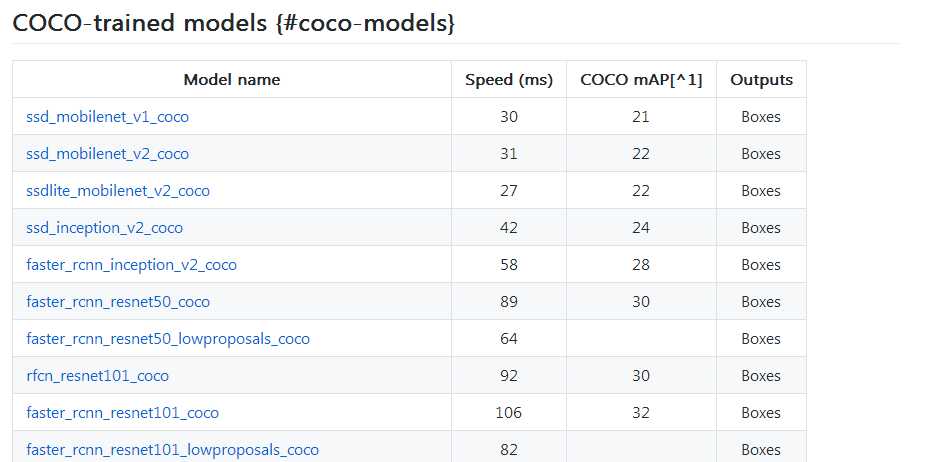
Object Detection 模块的位置与slim的位置相近,同在github.com 中TensorFlow 的models\research目录下。类似slim, Object Detection也囊括了各种关于物体检测的各种先进模型:
上述每一个模型的冻结权重 (在COCO数据集上训练)可被直接加载使用。
SSD模型使用了轻量化的MobileNet,这意味着它们可以轻而易举地在移动设备中实时使用。谷歌使用了 Fast R-CNN模型需要更多计算资源,但结果更为准确。
在在实物检测领域,训练模型的最权威数据集就是COCO数据集。
COCO数据集是微软发布的一个可以用来进行图像识别训练的数据集,官方网址为http://mscoco.org 其图像主要从复杂的日常场景中截取,图像中的目标通过精确的segmentation进行位置的标定。
COCO数据集包括91类目标,分两部分发布,前部分于2014年发布,后部分于2015年发布。
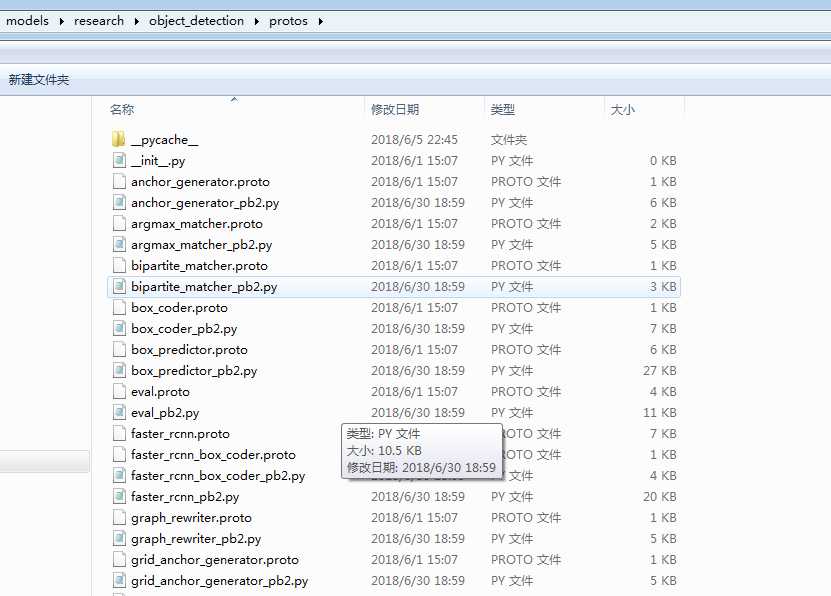
Objet Detection API使用protobufs来配置模型和训练参数,这些文件以".proto"的扩展名放models\research\object_detection\protos下。在使用框架之前,必须使用protobuf库将其编译成py文件才可以正常运行。protobuf库的下载地址为https://github.com/google/protobuf/releases/tag/v2.6.1

下载并解压protoc-2.6.1-win32.zip到models\research路径下。
打开cmd命令行,进入models\research目录下,执行如下命令
protoc.exe object_detection/protos/*.proto --python_out=.

如果不显示任何信心,则表明运行成功了,为了检验成功效果,来到models\research\object_detection\protos下,可以看到生成很多.py文件。
如果前面两步都完成了,下面可以测试一下object detection API是否可以正常使用,还需要两步操作:
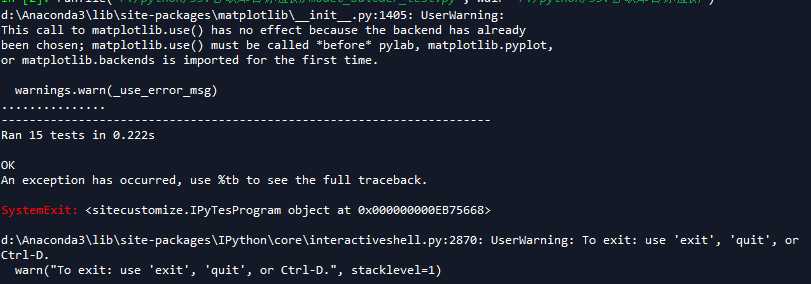
表明object detection API一切正常,可以使用、
为了不用每次都将文件复制到Object Detection文件夹外,可以将Object Detection加到python引入库的默认搜索路径中,将Object Detection文件整个复制到anaconda3安装文件目录下lib\site-packages下:
这样无论文件在哪里,只要搜索import Objec Detection xxx,系统到会找到Objec Detection。
之前已经说过Objec Detection API默认提供了5个预训练模型。他们都是使用COCO数据集训练完成的,如何使用这些预训练模型呢?官方已经给了一个用jupyter notebook编写好的例子。首先在research文件下下,运行命令:jupyter-notebook,会直接打开http://localhost:8888/tree。
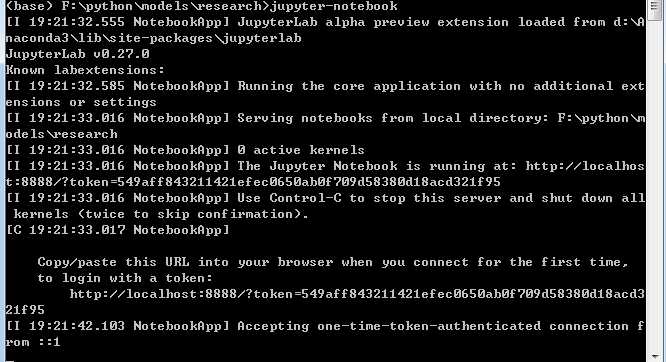
接着打开object_detection文件夹,并单击object_detection_tutorial.jpynb运行示例文件。
该代码使用Object Detection API基于COCO上训练的ssd_mobilenet_v1模型,对任意图片进行分类识别。
之前介绍的已有模型,在下面网站可以下载:https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/detection_model_zoo.md
每一个压缩文件里包含以下文件:
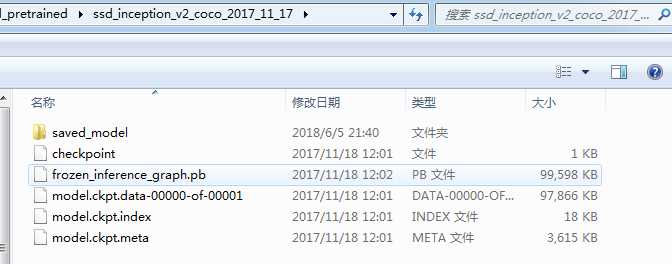
我们在models\research文件夹下创建一个文件夹my_download_pretrained,用于保存预训练的模型。
我们对该代码进行一些修改,并给出该代码的中文注释:
在models\research下创建my_object_detection.py文件。
# -*- coding: utf-8 -*- """ Created on Tue Jun 5 20:34:06 2018 @author: zy """ ‘‘‘ 调用Object Detection API进行实物检测 需要GPU运行环境,CPU下会报错 模型下载网址:https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/detection_model_zoo.md TensorFlow 生成的 .ckpt 和 .pb 都有什么用? https://www.cnblogs.com/nowornever-L/p/6991295.html 如何用Tensorflow训练模型成pb文件(一)——基于原始图片的读取 https://blog.csdn.net/u011463646/article/details/77918980?fps=1&locationNum=7 ‘‘‘ import matplotlib.pyplot as plt import numpy as np import os import tensorflow as tf from object_detection.utils import label_map_util from object_detection.utils import visualization_utils as vis_util from PIL import Image def test(): #重置图 tf.reset_default_graph() ‘‘‘ 载入模型以及数据集样本标签,加载待测试的图片文件 ‘‘‘ #指定要使用的模型的路径 包含图结构,以及参数 PATH_TO_CKPT = ‘./my_download_pretrained/ssd_mobilenet_v1_coco_2017_11_17/frozen_inference_graph.pb‘ #测试图片所在的路径 PATH_TO_TEST_IMAGES_DIR = ‘./object_detection/test_images‘ TEST_IMAGE_PATHS = [os.path.join(PATH_TO_TEST_IMAGES_DIR,‘image{}.jpg‘.format(i)) for i in range(1,3) ] #数据集对应的label mscoco_label_map.pbtxt文件保存了index到类别名的映射 PATH_TO_LABELS = os.path.join(‘./object_detection/data‘,‘mscoco_label_map.pbtxt‘) NUM_CLASSES = 90 #重新定义一个图 output_graph_def = tf.GraphDef() with tf.gfile.GFile(PATH_TO_CKPT,‘rb‘) as fid: #将*.pb文件读入serialized_graph serialized_graph = fid.read() #将serialized_graph的内容恢复到图中 output_graph_def.ParseFromString(serialized_graph) #print(output_graph_def) #将output_graph_def导入当前默认图中(加载模型) tf.import_graph_def(output_graph_def,name=‘‘) print(‘模型加载完成‘) #载入coco数据集标签文件 label_map = label_map_util.load_labelmap(PATH_TO_LABELS) categories = label_map_util.convert_label_map_to_categories(label_map,max_num_classes = NUM_CLASSES,use_display_name = True) category_index = label_map_util.create_category_index(categories) ‘‘‘ 定义session ‘‘‘ def load_image_into_numpy_array(image): ‘‘‘ 将图片转换为ndarray数组的形式 ‘‘‘ im_width,im_height = image.size return np.array(image.getdata()).reshape((im_height,im_width,3)).astype(np.uint0) #设置输出图片的大小 IMAGE_SIZE = (12,8) #使用默认图,此时已经加载了模型 detection_graph = tf.get_default_graph() with tf.Session(graph=detection_graph) as sess: for image_path in TEST_IMAGE_PATHS: image = Image.open(image_path) #将图片转换为numpy格式 image_np = load_image_into_numpy_array(image) ‘‘‘ 定义节点,运行并可视化 ‘‘‘ #将图片扩展一维,最后进入神经网络的图片格式应该是[1,?,?,3] image_np_expanded = np.expand_dims(image_np,axis = 0) ‘‘‘ 获取模型中的tensor ‘‘‘ image_tensor = detection_graph.get_tensor_by_name(‘image_tensor:0‘) #boxes用来显示识别结果 boxes = detection_graph.get_tensor_by_name(‘detection_boxes:0‘) #Echo score代表识别出的物体与标签匹配的相似程度,在类型标签后面 scores = detection_graph.get_tensor_by_name(‘detection_scores:0‘) classes = detection_graph.get_tensor_by_name(‘detection_classes:0‘) num_detections = detection_graph.get_tensor_by_name(‘num_detections:0‘) #开始检查 boxes,scores,classes,num_detections = sess.run([boxes,scores,classes,num_detections], feed_dict={image_tensor:image_np_expanded}) #可视化结果 vis_util.visualize_boxes_and_labels_on_image_array( image_np, np.squeeze(boxes), np.squeeze(classes).astype(np.int32), np.squeeze(scores), category_index, use_normalized_coordinates=True, line_thickness=8) plt.figure(figsize=IMAGE_SIZE) print(type(image_np)) print(image_np.shape) image_np = np.array(image_np,dtype=np.uint8) plt.imshow(image_np) if __name__ == ‘__main__‘: test()
以VOC 2012数据集为例,介绍如何使用Object Detection API训练新的模型。VOC 2012是VOC2007数据集的升级版,一共有11530张图片,每张图片都有标准,标注的物体包括人、动物(如猫、狗、鸟等)、交通工具(如车、船飞机等)、家具(如椅子、桌子、沙发等)在内的20个类别。
首先下载数据集,并将其转换为tfrecord格式。下载地址为:http://host.robots.ox.ac.uk/pascal/VOC/voc2012‘/VOCtrainval_11-May-2012.tar。
首先下载谷歌models库,然后删除一些不必要的文件,得到文件结构如下:
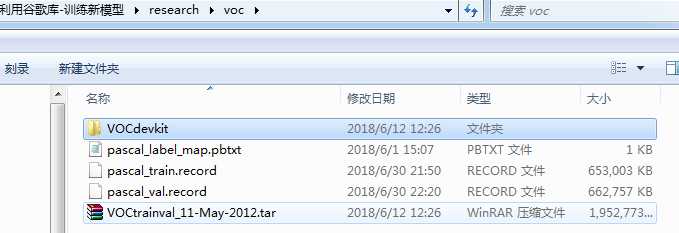
在research文件夹下,创建一个voc文件夹,把VOC2012解压到这个文件夹下,解压后,得到一个VOCdevkit文件夹:
JPEGImages文件中存储了所有的图像数据。对于每一张图像,都在Annotations文件夹中有其物体框的标注,包括图片文件名,图片大小,图片边界框等信息。ImageSets\Main文件夹下的文件存放着训练和校验时所使用到的文件的文件名。
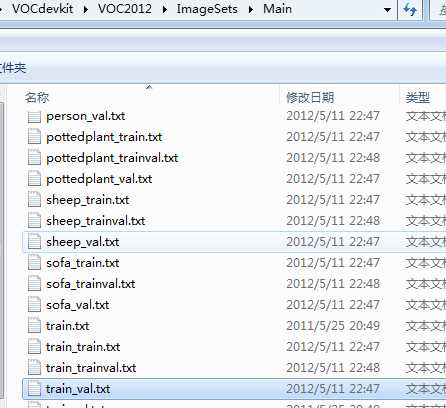
ImageSets里Main文件夹,推荐使用下面3个文件:
以2007_000027.xml为例:
<annotation> <folder>VOC2012</folder> <filename>2007_000027.jpg</filename> <source> <database>The VOC2007 Database</database> <annotation>PASCAL VOC2007</annotation> <image>flickr</image> </source> <size> <width>486</width> <height>500</height> <depth>3</depth> </size> <segmented>0</segmented> <object> <name>person</name> <pose>Unspecified</pose> <truncated>0</truncated> <difficult>0</difficult> <bndbox> <xmin>174</xmin> <ymin>101</ymin> <xmax>349</xmax> <ymax>351</ymax> </bndbox> <part> <name>head</name> <bndbox> <xmin>169</xmin> <ymin>104</ymin> <xmax>209</xmax> <ymax>146</ymax> </bndbox> </part> <part> <name>hand</name> <bndbox> <xmin>278</xmin> <ymin>210</ymin> <xmax>297</xmax> <ymax>233</ymax> </bndbox> </part> <part> <name>foot</name> <bndbox> <xmin>273</xmin> <ymin>333</ymin> <xmax>297</xmax> <ymax>354</ymax> </bndbox> </part> <part> <name>foot</name> <bndbox> <xmin>319</xmin> <ymin>307</ymin> <xmax>340</xmax> <ymax>326</ymax> </bndbox> </part> </object> </annotation>
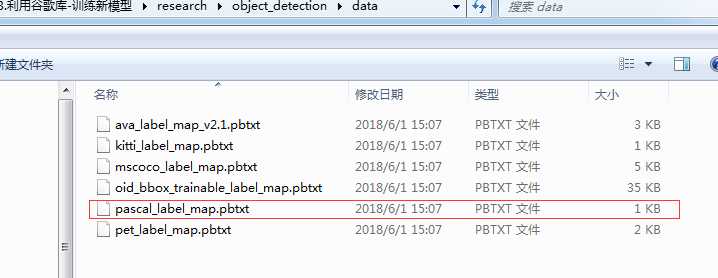
把pascal_label_map.pbtxt文件复制到voc文件夹下,这个文件存放在voc2012数据集物体的索引和对应的名字。
把create_pascal_tf_record.py文件复制到research文件夹下,这个代码是为VOC2012数据集提前编写好的。代码如下:

# Copyright 2017 The TensorFlow Authors. All Rights Reserved. # # Licensed under the Apache License, Version 2.0 (the "License"); # you may not use this file except in compliance with the License. # You may obtain a copy of the License at # # http://www.apache.org/licenses/LICENSE-2.0 # # Unless required by applicable law or agreed to in writing, software # distributed under the License is distributed on an "AS IS" BASIS, # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. # See the License for the specific language governing permissions and # limitations under the License. # ============================================================================== r"""Convert raw PASCAL dataset to TFRecord for object_detection. Example usage: ./create_pascal_tf_record --data_dir=/home/user/VOCdevkit --year=VOC2012 --output_path=/home/user/pascal.record """ from __future__ import absolute_import from __future__ import division from __future__ import print_function import hashlib import io import logging import os from lxml import etree import PIL.Image import tensorflow as tf from object_detection.utils import dataset_util from object_detection.utils import label_map_util import sys #配置logging logging.basicConfig(format=‘%(asctime)s %(levelname)s %(message)s‘, level=logging.INFO, stream=sys.stdout) #命令行参数 主要包括数据集根目录,数据类型,输出tf文件路径等 flags = tf.app.flags flags.DEFINE_string(‘data_dir‘, ‘‘, ‘Root directory to raw PASCAL VOC dataset.‘) flags.DEFINE_string(‘set‘, ‘train‘, ‘Convert training set, validation set or ‘ ‘merged set.‘) flags.DEFINE_string(‘annotations_dir‘, ‘Annotations‘, ‘(Relative) path to annotations directory.‘) flags.DEFINE_string(‘year‘, ‘VOC2007‘, ‘Desired challenge year.‘) flags.DEFINE_string(‘output_path‘, ‘‘, ‘Path to output TFRecord‘) flags.DEFINE_string(‘label_map_path‘, ‘voc/pascal_label_map.pbtxt‘, ‘Path to label map proto‘) flags.DEFINE_boolean(‘ignore_difficult_instances‘, False, ‘Whether to ignore ‘ ‘difficult instances‘) FLAGS = flags.FLAGS SETS = [‘train‘, ‘val‘, ‘trainval‘, ‘test‘] YEARS = [‘VOC2007‘, ‘VOC2012‘, ‘merged‘] def dict_to_tf_example(data, dataset_directory, label_map_dict, ignore_difficult_instances=False, image_subdirectory=‘JPEGImages‘): """Convert XML derived dict to tf.Example proto. Notice that this function normalizes the bounding box coordinates provided by the raw data. Args: data: dict holding PASCAL XML fields for a single image (obtained by running dataset_util.recursive_parse_xml_to_dict) dataset_directory: Path to root directory holding PASCAL dataset label_map_dict: A map from string label names to integers ids. ignore_difficult_instances: Whether to skip difficult instances in the dataset (default: False). image_subdirectory: String specifying subdirectory within the PASCAL dataset directory holding the actual image data. Returns: example: The converted tf.Example. Raises: ValueError: if the image pointed to by data[‘filename‘] is not a valid JPEG """ #获取相对图片路径 img_path = os.path.join(data[‘folder‘], image_subdirectory, data[‘filename‘]) #获取图片绝对路径 full_path = os.path.join(dataset_directory, img_path) #读取图片 with tf.gfile.GFile(full_path, ‘rb‘) as fid: encoded_jpg = fid.read() encoded_jpg_io = io.BytesIO(encoded_jpg) image = PIL.Image.open(encoded_jpg_io) if image.format != ‘JPEG‘: raise ValueError(‘Image format not JPEG‘) key = hashlib.sha256(encoded_jpg).hexdigest() #获取图片的宽和高 width = int(data[‘size‘][‘width‘]) height = int(data[‘size‘][‘height‘]) xmin = [] ymin = [] xmax = [] ymax = [] classes = [] classes_text = [] truncated = [] poses = [] difficult_obj = [] for obj in data[‘object‘]: #是否为难以辨识的物体, 主要指要结体背景才能判断出类别的物体。虽有标注, 但一般忽略这类物体 跳过难以识别的? difficult = bool(int(obj[‘difficult‘])) if ignore_difficult_instances and difficult: continue difficult_obj.append(int(difficult)) #bounding box 计算目标边界 归一化到[0,1]之间 左上角坐标,右下角坐标 xmin.append(float(obj[‘bndbox‘][‘xmin‘]) / width) ymin.append(float(obj[‘bndbox‘][‘ymin‘]) / height) xmax.append(float(obj[‘bndbox‘][‘xmax‘]) / width) ymax.append(float(obj[‘bndbox‘][‘ymax‘]) / height) #类别名 classes_text.append(obj[‘name‘].encode(‘utf8‘)) #获取该类别对应的标签 classes.append(label_map_dict[obj[‘name‘]]) #物体是否被部分遮挡 truncated.append(int(obj[‘truncated‘])) #物体的姿势 poses.append(obj[‘pose‘].encode(‘utf8‘)) #tf文件一条记录格式 example = tf.train.Example(features=tf.train.Features(feature={ ‘image/height‘: dataset_util.int64_feature(height), ‘image/width‘: dataset_util.int64_feature(width), ‘image/filename‘: dataset_util.bytes_feature( data[‘filename‘].encode(‘utf8‘)), ‘image/source_id‘: dataset_util.bytes_feature( data[‘filename‘].encode(‘utf8‘)), ‘image/key/sha256‘: dataset_util.bytes_feature(key.encode(‘utf8‘)), ‘image/encoded‘: dataset_util.bytes_feature(encoded_jpg), ‘image/format‘: dataset_util.bytes_feature(‘jpeg‘.encode(‘utf8‘)), ‘image/object/bbox/xmin‘: dataset_util.float_list_feature(xmin), ‘image/object/bbox/xmax‘: dataset_util.float_list_feature(xmax), ‘image/object/bbox/ymin‘: dataset_util.float_list_feature(ymin), ‘image/object/bbox/ymax‘: dataset_util.float_list_feature(ymax), ‘image/object/class/text‘: dataset_util.bytes_list_feature(classes_text), ‘image/object/class/label‘: dataset_util.int64_list_feature(classes), ‘image/object/difficult‘: dataset_util.int64_list_feature(difficult_obj), ‘image/object/truncated‘: dataset_util.int64_list_feature(truncated), ‘image/object/view‘: dataset_util.bytes_list_feature(poses), })) return example def main(_): ‘‘‘ 主要是通过读取VOCdevkit\VOC2012\Annotations下的xml文件 然后获取对应的图片文件的路径,图片大小,文件名,边界框、以及图片数据等信息写入rfrecord文件 ‘‘‘ if FLAGS.set not in SETS: raise ValueError(‘set must be in : {}‘.format(SETS)) if FLAGS.year not in YEARS: raise ValueError(‘year must be in : {}‘.format(YEARS)) data_dir = FLAGS.data_dir years = [‘VOC2007‘, ‘VOC2012‘] if FLAGS.year != ‘merged‘: years = [FLAGS.year] #创建对象,用于向记录文件写入记录 writer = tf.python_io.TFRecordWriter(FLAGS.output_path) #获取类别名->index的映射 dict类型 label_map_dict = label_map_util.get_label_map_dict(FLAGS.label_map_path) for year in years: logging.info(‘Reading from PASCAL %s dataset.‘, year) #获取aeroplane_train.txt文件的全路径 改文件保存部分文件名(一共5717/5823个文件,各类图片都有) examples_path = os.path.join(data_dir, year, ‘ImageSets‘, ‘Main‘, ‘aeroplane_‘ + FLAGS.set + ‘.txt‘) #获取所有图片标注xml文件的路径 annotations_dir = os.path.join(data_dir, year, FLAGS.annotations_dir) #list 存放文件名 examples_list = dataset_util.read_examples_list(examples_path) #遍历annotations_dir目录下,examples_list中指定的xml文件 for idx, example in enumerate(examples_list): if idx % 100 == 0: logging.info(‘On image %d of %d‘, idx, len(examples_list)) path = os.path.join(annotations_dir, example + ‘.xml‘) with tf.gfile.GFile(path, ‘r‘) as fid: xml_str = fid.read() xml = etree.fromstring(xml_str) #获取annotation节点的内容 data = dataset_util.recursive_parse_xml_to_dict(xml)[‘annotation‘] #把数据整理成tfrecord需要的数据结构 tf_example = dict_to_tf_example(data, FLAGS.data_dir, label_map_dict, FLAGS.ignore_difficult_instances) #向tf文件写入一条记录 writer.write(tf_example.SerializeToString()) writer.close() if __name__ == ‘__main__‘: tf.app.run()
如果读者希望使用自己的数据集,有两种方法:
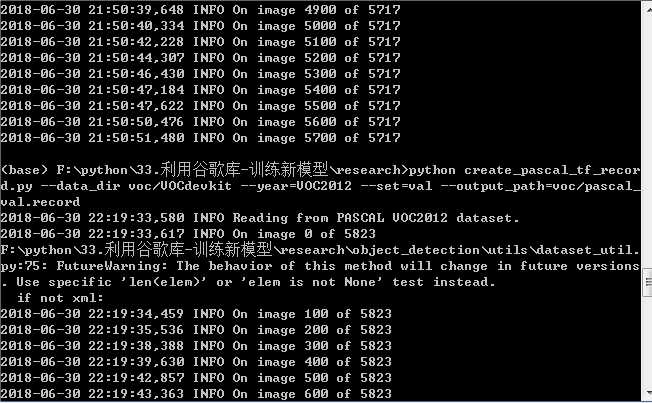
在research文件夹中,执行以下命令可以把VOC2012数据集转换为tfrecord格式,转换好的tfrecord保存在voc文件夹下,分别为pasal_train.record和pascal_val.record:
python create_pascal_tf_record.py --data_dir voc/VOCdevkit --year=VOC2012 --set=train --output_path=voc/pascal_train.record
python create_pascal_tf_record.py --data_dir voc/VOCdevkit --year=VOC2012 --set=val --output_path=voc/pascal_val.record
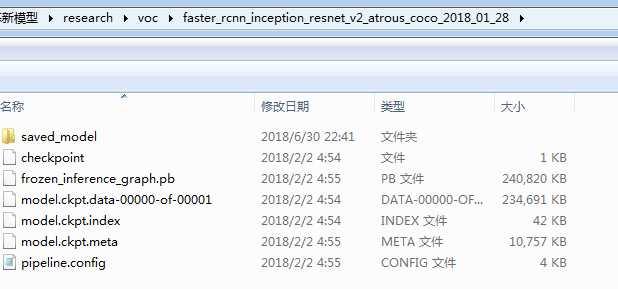
下载完VOC 2012数据集后,需要选择合适的训练模型。这里以Faster R-CNN + Inception-ResNet_v2模型为例进行介绍。首先下载在COCO数据集上预训练的Faster R-CNN + Inception-ResNet_v2模型。解压到voc文件夹下,如图:
Object Detection API是依赖一种特殊的设置文件进行训练的。在object_detection/samples/configs文件夹下,有一些设置文件的示例。可以参考faster_rcnn_inception_resnet_v2_atrous_coco.config文件创建的设置文件。先将faster_rcnn_inception_resnet_v2_atrous_coco.config复制一份到voc文件夹下,命名为faster_rcnn_inception_resnet_v2_atrous_voc.config。
faster_rcnn_inception_resnet_v2_atrous_voc.config文件有7处需要修改:
gradient_clipping_by_norm: 10.0 fine_tune_checkpoint: "voc/faster_rcnn_inception_resnet_v2_atrous_coco_2018_01_28/model.ckpt" from_detection_checkpoint: true # Note: The below line limits the training process to 200K steps, which we # empirically found to be sufficient enough to train the pets dataset. This # effectively bypasses the learning rate schedule (the learning rate will # never decay). Remove the below line to train indefinitely. num_steps: 200000 data_augmentation_options { random_horizontal_flip { } } } train_input_reader: { tf_record_input_reader { input_path: "voc/pascal_train.record" } label_map_path: "voc/pascal_label_map.pbtxt" } eval_config: { num_examples: 5823 # Note: The below line limits the evaluation process to 10 evaluations. # Remove the below line to evaluate indefinitely. max_evals: 10 } eval_input_reader: { tf_record_input_reader { input_path: "voc/pascal_val.record" } label_map_path: "voc/pascal_label_map.pbtxt" shuffle: false num_readers: 1 }
最后,在voc文件夹中新建一个train_dir作为保存模型和日志的目录,把object_detection目录下的train.py文件复制到research下,在research目录下,使用下面的命令就可以开始训练了:
python train.py --train_dir voc/train_dir/ --pipeline_config_path voc/faster_rcnn_inception_resnet_v2_atrous_voc.config
第三十一节,使用谷歌Object Detection API进行目标检测
标签:nta amp 网址 文件 Oz 基于 under 微软 devkit
原文地址:https://www.cnblogs.com/zyly/p/9248394.html
