标签:开发 在顶部 tps 黄色 Edito 帮助 src 修改 ref
原先可以在unity的Asset Stroe 下载到,但是现在Rain 的开发公司因为人工智能的发展,公司得到投资,所以下架了rain插件。
所以我给出网盘链接
链接:https://share.weiyun.com/5BKFvOn 密码:wsikw8
链接失效请联系我。
导入后可以看到在顶部已经有了RAIN![]()
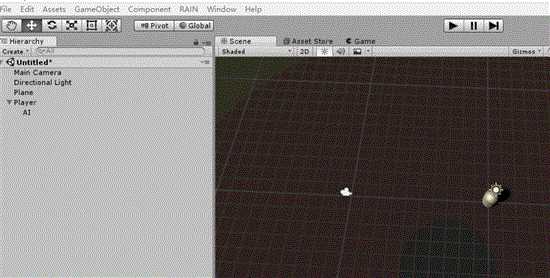
创建一个地板和一个Ai对象如图:
选择要操作的Ai对象,创建AI子物体
我们可以看到AI自物件上有这么一个组件
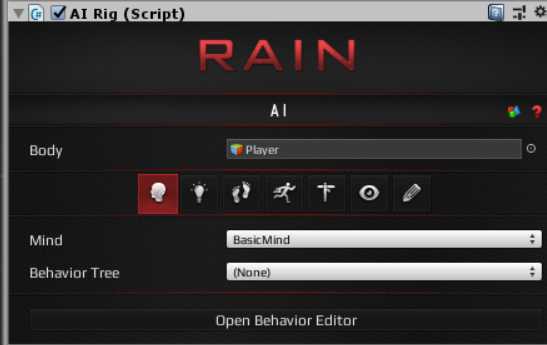
参数如下:
AI:当前这个rain 控制器的名字
Body:所控制的物体
Mind:思考方式(免费版只有BasicMind)
Behavior Tree :使用的行为树
Open Behavior Editor:打开行为树编辑窗口
3.让物体到达我们指定的点
我们打开行为树编辑窗口
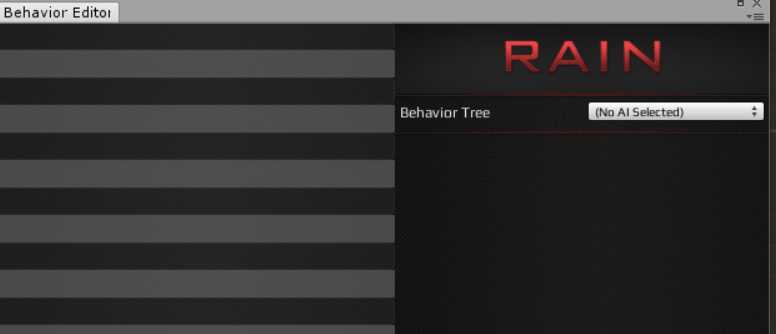
Behavior Tree :当前的行为树
我们先创建一棵行为树(点击框,选create),给行为树一个名字(注意不能输入中文)
rain会为我们创建1个root默认节点(默认是SEQ[依次执行其子节点]),不懂的请自己查询行为树节点类型

创建一个move的子节点
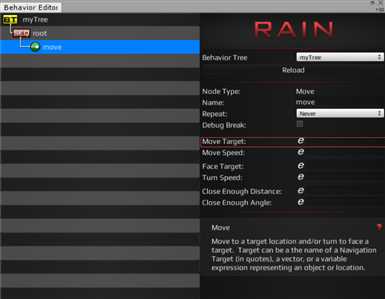
我们发现我们缺少一个移动target
如图创建一个导航目标
修改导航目标名称为tar1
我们可以点击这个按钮使tar1沉降到plan上

在行为树上设置目标(注意:一定要+"")
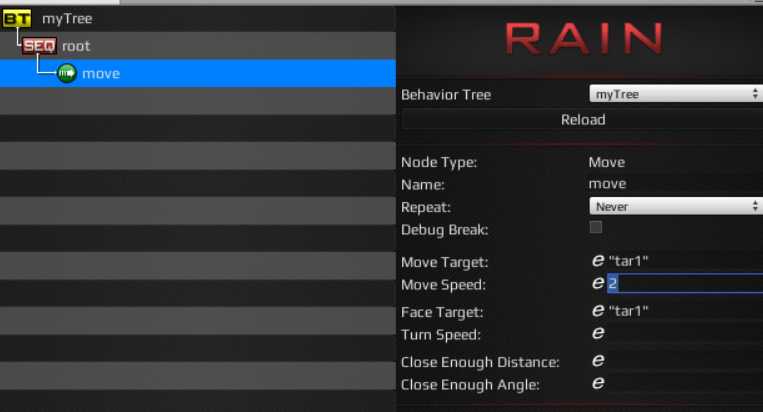
face target 就是面向的方向
为AI物件指定使用的行为树
![]()
点击运行,我们看到缓缓移动到目标点,且下面行为树,颜色从运行中(黄色)到运行成功(绿色)

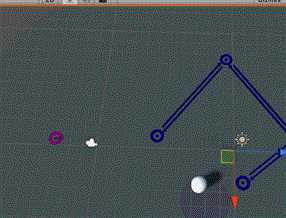
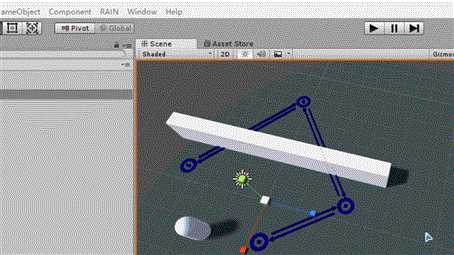
如图创建route 路径
在创建的route对象上 点击增加新路点,并将Waypoint Route对象改名为Route

创建如图所示的行为树
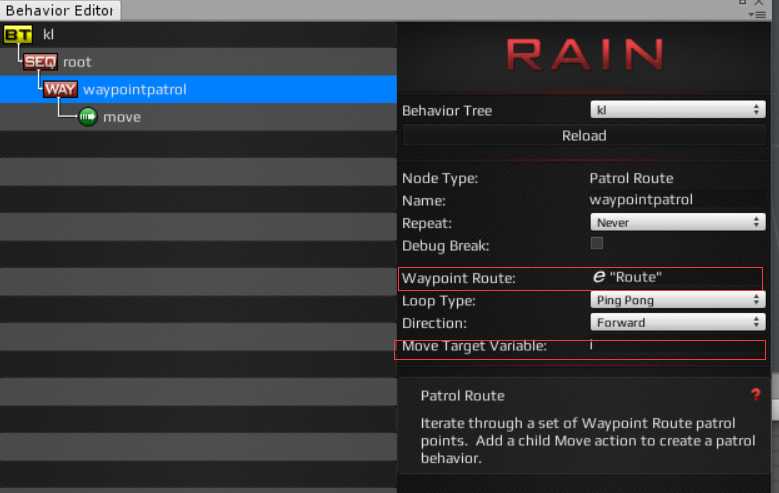
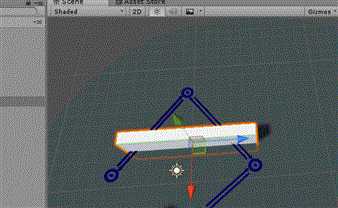
注意我框住的2个内容,i表示迭代变量(当前路点)
在move节点中设置对应的目标
![]()
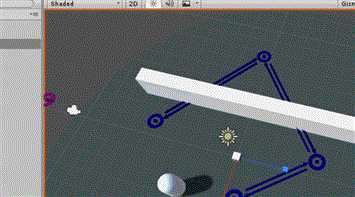
因为我设置的是pingpong运动所以会来回往复。
我们在中间放一个障碍物我们发现它直接穿透了,这不是我们想要的效果。
创建一个导航网格,使其能包住我们需要运算的场景。
点击生成网格

运行后发现已经比较完美的绕开障碍物了。
标签:开发 在顶部 tps 黄色 Edito 帮助 src 修改 ref
原文地址:https://www.cnblogs.com/Fasty/p/9311307.html