标签:style 准备工作 inf ted restrict ber package 系统 ubuntu
第一步:首先安装ROS kinetic:
参考:https://blog.csdn.net/softimite_zifeng/article/details/78632211
https://blog.csdn.net/xuehuafeiwu123/article/details/52549872
安装前的准备工作
1. 配置Ubuntu的资源库:"restricted","universe"和"multiverse"
打开系统设置->软件与更新:

确保"restricted","universe"和"multiverse"这三个选项被勾选。
然后更改download from:在下拉框中选择其他站点->选择最佳服务器->选择服务器。
2.设置软件源:sources.list
键入命令:
sudo sh -c ‘echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list‘
3.设置 keys
键入命令:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
开始安装:
1.更新软件及安装
1 sudo apt-get update 2 sudo apt-get install ros-Kinetic-desktop-full
报错:E: 无法定位软件包 ros-Kinetic-desktop-full
解决:后来发现应该是sudo apt-get install ros-kinetic-desktop-full.怎么样,有没有发现什么?把‘k’敲成‘K’啦.犯的错都是经验,虽然有些菜……
更正后:
1 sudo apt-get install ros-kinetic-desktop-full
不过又报错:
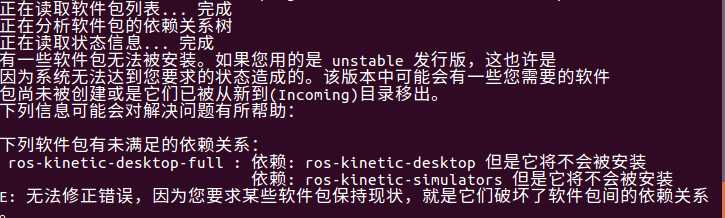
解决方法:
1 sudo apt-get update 2 sudo apt-get install ros-kinetic-desktop 3 sudo apt-get instal lros-kinetic-simulators
再输入:
sudo apt-get install ros-kinetic-desktop-full
问题解决。
安装完可以查看可用的package(有什么用呢??)
apt-cache search ros-kinetic
2.初始化 rosdep
1 sudo rosdep init 2 rosdep update
3.环境配置
1 echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc 2 source ~/.bashrc
报错:

错误原因:还是这个K!!!而且你会发现这个命令输错了有多么可怕。这个报错会在只要你打开一个终端时就会出现,重启?不管用的
所以现在我们来彻底解决它(解决方法在网上找的……:https://blog.csdn.net/qq_31077649/article/details/72676392)
解决:
在终端输入:gedit .bashrc
1 echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc 2 source ~/.bashrc
4.安装building package的依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
5.测试ROS安装是否成功
roscore
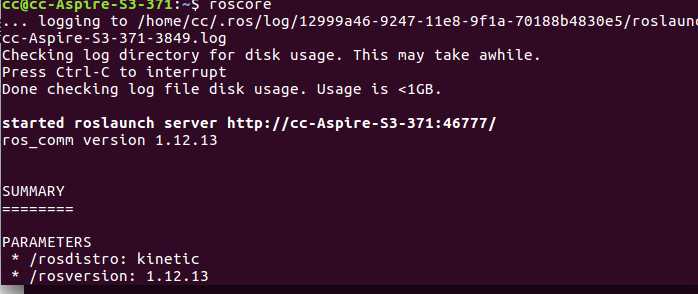
出现这样的结果,说明安装成功。
第二步:安装LSD-SLAM
标签:style 准备工作 inf ted restrict ber package 系统 ubuntu
原文地址:https://www.cnblogs.com/cc111/p/9382694.html