标签:网络 调度 协同 支持 camel 功能 种类型 工作 when
Pod是可以创建和管理Kubernetes计算的最小可部署单元。一个Pod代表着集群中运行的一个进程。
Pod就像是豌豆荚一样,它由一个或者多个容器组成(例如Docker容器),它们共享容器存储、网络和容器运行配置项。Pod中的容器总是被同时调度,有共同的运行环境。你可以把单个Pod想象成是运行独立应用的“逻辑主机”——其中运行着一个或者多个紧密耦合的应用容器——在有容器之前,这些应用都是运行在几个相同的物理机或者虚拟机上。
尽管kubernetes支持多种容器运行时,但是Docker依然是最常用的运行时环境,我们可以使用Docker的术语和规则来定义Pod。
Pod中共享的环境包括Linux的namespace,cgroup和其他可能的隔绝环境,这一点跟Docker容器一致。在Pod的环境中,每个容器中可能还有更小的子隔离环境。
Pod中的容器共享IP地址和端口号,它们之间可以通过localhost互相发现。它们之间可以通过进程间通信,例如SystemV信号或者POSIX共享内存。不同Pod之间的容器具有不同的IP地址,不能直接通过IPC通信。
Pod中的容器也有访问共享volume的权限,这些volume会被定义成pod的一部分并挂载到应用容器的文件系统中。
就像每个应用容器,pod被认为是临时实体。在Pod的生命周期中,pod被创建后,被分配一个唯一的ID(UID),调度到节点上,并一致维持期望的状态直到被终结(根据重启策略)或者被删除。如果node死掉了,分配到了这个node上的pod,在经过一个超时时间后会被重新调度到其他node节点上。一个给定的pod(如UID定义的)不会被“重新调度”到新的节点上,而是被一个同样的pod取代,如果期望的话甚至可以是相同的名字,但是会有一个新的UID(查看replication controller获取详情)。
Pod中可以同时运行多个进程(作为容器运行)协同工作。同一个Pod中的容器会自动的分配到同一个 node 上。同一个Pod中的容器共享资源、网络环境和依赖,它们总是被同时调度。
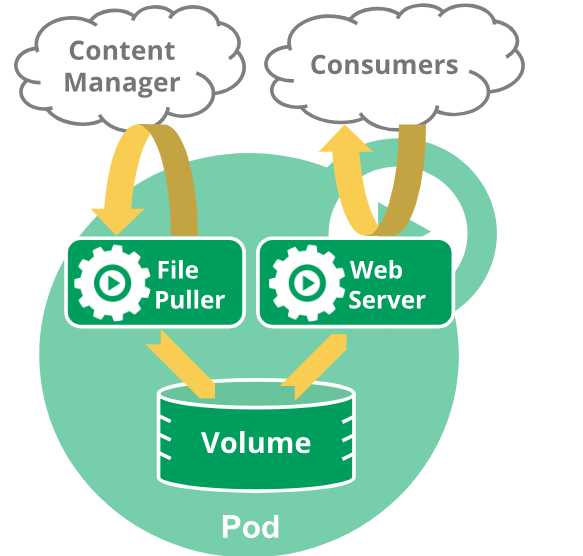
注意在一个Pod中同时运行多个容器是一种比较高级的用法。只有当你的容器需要紧密配合协作的时候才考虑用这种模式。例如,你有一个容器作为web服务器运行,需要用到共享的volume,有另一个“sidecar”容器来从远端获取资源更新这些文件。如图
Pod中可以共享两种资源
localhost互相通信。Pod中的容器与外界通信时,必须分配共享网络资源(例如使用宿主机的端口映射)。我通常把pod分为两类:
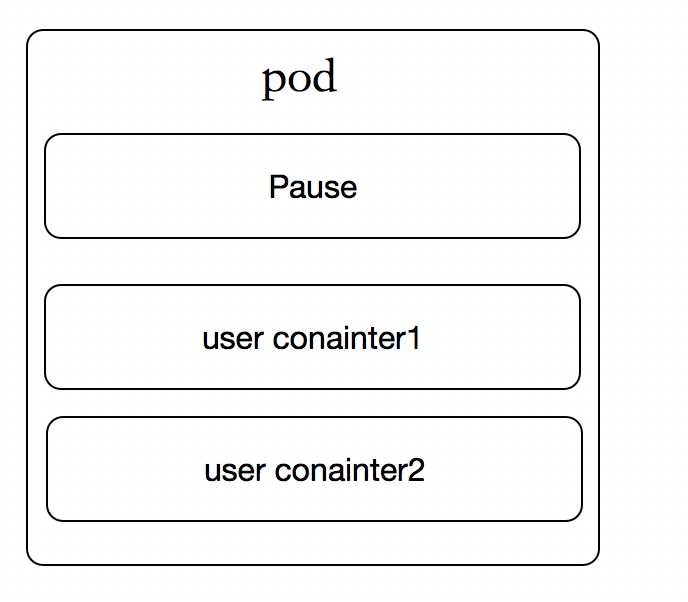
上图所示是Pod的组成示意图,我们看到每个Pod都有一个特殊的被称为“根容器”的Pause 容器。 Pause容器对应的镜像属于Kubernetes平台的一部分,除了Pause容器,每个Pod还包含一个或者多个紧密相关的用户业务容器。
因为Pod作为在集群的节点上运行的进程,所以在不再需要的时候能够优雅的终止掉是十分必要的(比起使用发送KILL信号这种暴力的方式)。用户需要能够放松删除请求,并且知道它们何时会被终止,是否被正确的删除。用户想终止程序时发送删除pod的请求,在pod可以被强制删除前会有一个宽限期,会发送一个TERM请求到每个容器的主进程。一旦超时,将向主进程发送KILL信号并从API server中删除。如果kubelet或者container manager在等待进程终止的过程中重启,在重启后仍然会重试完整的宽限期。
示例流程如下:
删除宽限期默认是30秒。 kubectl delete命令支持 --grace-period=<seconds> 选项,允许用户设置自己的宽限期。如果设置为0将强制删除pod。在kubectl>=1.5版本的命令中,你必须同时使用 --force 和 --grace-period=0 来强制删除pod。
在接触Kubernetes的初期,便知道集群搭建需要下载一个gcr.io/google_containers/pause-amd64:3.0镜像,然后每次启动一个容器,都会伴随一个pause容器的启动。
但这个pause容器的功能是什么,它是如何做出来的,以及为何都伴随容器启动等等。这些问题一直在我心里,如今有缘学习相关内容。
189fbd12e903 rancher/rancher-agent:v2.0.6 "run.sh -- share-r..." 10 days ago Exited (0) 10 days ago share-mnt [root@k8s-master ~]# docker ps -a | grep pause-amd64 f30cc4df0eff rancher/pause-amd64:3.1 "/pause" 4 days ago Up 4 days k8s_POD_confserver-bdf79c8cb-xxf82_confserver_f92c3ecc-a11b-11e8-a1c4-005056936694_0 af651c01f1e4 rancher/pause-amd64:3.1 "/pause" 5 days ago Up 5 days k8s_POD_jenkins-5cf89c84f6-h4hs6_jenkins_954201e0-a057-11e8-a1c4-005056936694_0 7ab1920551ca rancher/pause-amd64:3.1 "/pause" 10 days ago Up 10 days k8s_POD_nfs-provisioner-2cjpp_nfs-provisioner_a24395b7-9c42-11e8-a1c4-005056936694_0 4f89f1c2e83b rancher/pause-amd64:3.1 "/pause" 10 days ago Up 10 days k8s_POD_cattle-node-agent-s8s75_cattle-system_a2443a27-9c42-11e8-a1c4-005056936694_0 74ff9a7eb776 rancher/pause-amd64:3.1 "/pause" 10 days ago Up 10 days k8s_POD_nginx-ingress-controller-gl7k6_ingress-nginx_a239056d-9c42-11e8-a1c4-005056936694_0 76a3177f05ec rancher/pause-amd64:3.1 "/pause" 10 days ago Up 10 days k8s_POD_calico-node-7vzlj_kube-system_a2391472-9c42-11e8-a1c4-005056936694_0
kubernetes中的pause容器主要为每个业务容器提供以下功能:
Pod 的 status 在信息保存在 Podstatus 中定义,其中有一个 phase 字段。
Pod 的相位(phase)是 Pod 在其生命周期中的简单宏观概述。该阶段并不是对容器或 Pod 的综合汇总,也不是为了做为综合状态机。
Pod 相位的数量和含义是严格指定的。除了本文档中列举的状态外,不应该再假定 Pod 有其他的 phase 值。
下面是 phase 可能的值:
| 值 | 描述 |
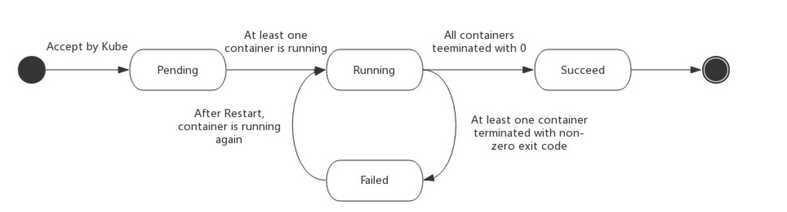
| Pending | Pod已被Kubernetes系统接受,但尚未创建一个或多个Container图像。这包括计划之前的时间以及通过网络下载图像所花费的时间,这可能需要一段时间 |
| Running | Pod已绑定到节点,并且已创建所有Container。至少有一个Container仍在运行,或者正在启动或重新启动 |
| Succeeded | Pod中的所有容器都已成功终止,并且不会重新启动 |
| Failed | Pod中的所有容器都已终止,并且至少有一个Container已终止失败。也就是说,Container要么退出非零状态,要么被系统终止 |
| Unknown | 由于某种原因,无法获得Pod的状态,这通常是由于与Pod的主机通信时出错 |
下图是Pod的生命周期示意图,从图中可以看到Pod状态的变化。
Pod有一个PodStatus,它有一个PodConditions 数组, Pod已经或没有通过它。PodCondition数组的每个元素都有六个可能的字段:
该lastProbeTime字段提供上次探测Pod条件的时间戳。
lastTransitionTime字段提供Pod最后从一个状态转换到另一个状态的时间戳message字段是人类可读的消息,指示有关转换的详细信息reason字段是该条件最后一次转换的唯一,单字,CamelCase原因status字段是一个字符串,可能的值为“ True”,“ False”和“ Unknown”type字段是一个包含以下可能值的字符串:
PodScheduled:Pod已被安排到一个节点;Initialized:所有init容器都已成功启动;nschedulable:调度程序现在无法调度Pod,例如由于缺少资源或其他限制ontainersReady:Pod中的所有容器都已准备就绪探针是由 Kubelet 对容器执行的定期诊断。要执行诊断,kubelet 调用由容器实现的 Handler。有三种类型的处理程序:
每个探针都有三个结果之一:
kubelet可以选择在运行容器上执行两种探测并对其做出反应:
livenessProbe:指示Container是否正在运行。如果存活探测失败,则kubelet会杀死Container,并且Container将受其重启策略的约束。如果Container未提供存活探测,则默认状态为Success。readinessProbe:指示Container是否已准备好为服务请求。如果就绪探测失败,则端点控制器会从与Pod匹配的所有服务的端点中删除Pod的IP地址。初始延迟之前的默认就绪状态是Failure。如果Container未提供就绪状态探测,则默认状态为Success。如果您的Container中的进程在遇到问题或变得不健康时自行崩溃,则不一定需要存活探测器; kubelet将根据Pod的restartPolicy自动执行正确的操作。
如果您希望在容器探测失败时杀死并重新启动,则指定存活探测,并指定restartPolicy为Always或OnFailure。
如果您只想在探测成功时开始向Pod发送流量,请指定就绪探测。在这种情况下,就绪探针可能与存活探测相同,但spec中就绪探针的存在意味着Pod将在不接收任何流量的情况下启动,并且仅在探针探测成功后才开始接收流量。
如果Container需要在启动期间处理大型数据,配置文件或迁移,请指定就绪探针。
如果您希望Container能够自行维护,您可以指定一个就绪探针,该探针检查特定于就绪的端点,该端点与活动探针不同。
请注意,如果您只想在Pod被删除时排除请求,则不一定需要就绪探测; 在删除Pod时,无论是否存在就绪探针,Pod都会自动将其置于未完成状态。当等待 Pod 中的容器停止时,Pod 仍处于未完成状态。
标签:网络 调度 协同 支持 camel 功能 种类型 工作 when
原文地址:https://www.cnblogs.com/xzkzzz/p/9507152.html