标签:矩阵 gpo operation eps error from markers 电脑 icc
简单的玩了下opencv里头的aruco,用的手机相机,手机装了个 ip摄像头,这样视频就可以传到电脑上了。

首先是标定,我没打印chessboard,直接在电脑屏幕上显示,拍了17张,大概如下:

又在手机上装了个 尺子 之类的app,比划着量了下,每个格子大概是18.1 mm,这个棋盘是10 x 7的棋盘。
要pip install opencv-contrib-python才有扩展模块,扩展模块中包含aruco
然后标定了一下:

1 import cv2 2 import numpy as np 3 import glob 4 import matplotlib.pyplot as plt 5 import matplotlib.patches as patches 6 7 8 # 找棋盘格角点 9 10 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # 阈值 11 #棋盘格模板规格 12 w = 9 # 10 - 1 13 h = 6 # 7 - 1 14 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 15 objp = np.zeros((w*h,3), np.float32) 16 objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) 17 objp = objp*18.1 # 18.1 mm 18 19 # 储存棋盘格角点的世界坐标和图像坐标对 20 objpoints = [] # 在世界坐标系中的三维点 21 imgpoints = [] # 在图像平面的二维点 22 23 images = glob.glob(‘./chessboard/*.jpg‘) # 拍摄的十几张棋盘图片所在目录 24 25 i = 1 26 for fname in images: 27 28 img = cv2.imread(fname) 29 gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) 30 # 找到棋盘格角点 31 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) 32 # 如果找到足够点对,将其存储起来 33 if ret == True: 34 print("i:", i) 35 i = i+1 36 37 cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) 38 objpoints.append(objp) 39 imgpoints.append(corners) 40 # 将角点在图像上显示 41 cv2.drawChessboardCorners(img, (w,h), corners, ret) 42 cv2.namedWindow(‘findCorners‘, cv2.WINDOW_NORMAL) 43 cv2.resizeWindow(‘findCorners‘, 810, 405) 44 cv2.imshow(‘findCorners‘,img) 45 cv2.waitKey(1) 46 cv2.destroyAllWindows() 47 #%% 标定 48 ret, mtx, dist, rvecs, tvecs = 49 cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) 50 51 52 print("ret:",ret ) 53 print("mtx:\n",mtx) # 内参数矩阵 54 print("dist:\n",dist ) # 畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3) 55 print("rvecs:\n",rvecs) # 旋转向量 # 外参数 56 print("tvecs:\n",tvecs ) # 平移向量 # 外参数
标定结果里对aruco有用的是 mtx 和 dist。
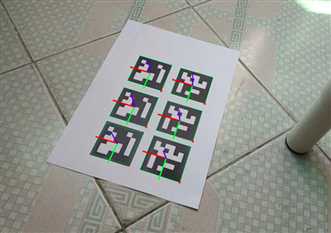
然后打印包含aruco的marker的纸,运行下面的代码就可以玩了:
1 import numpy as np 2 import time 3 import cv2 4 import cv2.aruco as aruco 5 6 #with np.load(‘webcam_calibration_output.npz‘) as X: 7 # mtx, dist, _, _ = [X[i] for i in (‘mtx‘,‘dist‘,‘rvecs‘,‘tvecs‘)] 8 9 #mtx = 10 #2946.48 0 1980.53 11 #0 2945.41 1129.25 12 #0 0 1 13 14 mtx = np.array([ 15 [2946.48, 0, 1980.53], 16 [ 0, 2945.41, 1129.25], 17 [ 0, 0, 1], 18 ]) 19 #我的手机拍棋盘的时候图片大小是 4000 x 2250 20 #ip摄像头拍视频的时候设置的是 1920 x 1080,长宽比是一样的, 21 #ip摄像头设置分辨率的时候注意一下 22 23 24 dist = np.array( [0.226317, -1.21478, 0.00170689, -0.000334551, 1.9892] ) 25 26 video = "http://admin:admin@192.168.1.2:8081/" # 手机ip摄像头 27 # 根据ip摄像头在你手机上生成的ip地址更改,右上角可修改图像分辨率 28 29 cap = cv2.VideoCapture(video) 30 31 32 font = cv2.FONT_HERSHEY_SIMPLEX #font for displaying text (below) 33 34 #num = 0 35 while True: 36 ret, frame = cap.read() 37 # operations on the frame come here 38 39 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) 40 aruco_dict = aruco.Dictionary_get(aruco.DICT_6X6_250) 41 parameters = aruco.DetectorParameters_create() 42 43 ‘‘‘ 44 detectMarkers(...) 45 detectMarkers(image, dictionary[, corners[, ids[, parameters[, rejectedI 46 mgPoints]]]]) -> corners, ids, rejectedImgPoints 47 ‘‘‘ 48 49 #lists of ids and the corners beloning to each id 50 corners, ids, rejectedImgPoints = aruco.detectMarkers(gray, 51 aruco_dict, 52 parameters=parameters) 53 54 # if ids != None: 55 if ids is not None: 56 57 rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners, 0.05, mtx, dist) 58 # Estimate pose of each marker and return the values rvet and tvec---different 59 # from camera coeficcients 60 (rvec-tvec).any() # get rid of that nasty numpy value array error 61 62 # aruco.drawAxis(frame, mtx, dist, rvec, tvec, 0.1) #Draw Axis 63 # aruco.drawDetectedMarkers(frame, corners) #Draw A square around the markers 64 65 for i in range(rvec.shape[0]): 66 aruco.drawAxis(frame, mtx, dist, rvec[i, :, :], tvec[i, :, :], 0.03) 67 aruco.drawDetectedMarkers(frame, corners) 68 ###### DRAW ID ##### 69 # cv2.putText(frame, "Id: " + str(ids), (0,64), font, 1, (0,255,0),2,cv2.LINE_AA) 70 71 72 else: 73 ##### DRAW "NO IDS" ##### 74 cv2.putText(frame, "No Ids", (0,64), font, 1, (0,255,0),2,cv2.LINE_AA) 75 76 # Display the resulting frame 77 cv2.imshow("frame",frame) 78 79 key = cv2.waitKey(1) 80 81 if key == 27: # 按esc键退出 82 print(‘esc break...‘) 83 cap.release() 84 cv2.destroyAllWindows() 85 break 86 87 if key == ord(‘ ‘): # 按空格键保存 88 # num = num + 1 89 # filename = "frames_%s.jpg" % num # 保存一张图像 90 filename = str(time.time())[:10] + ".jpg" 91 cv2.imwrite(filename, frame)
最后效果如下:
标签:矩阵 gpo operation eps error from markers 电脑 icc
原文地址:https://www.cnblogs.com/shepherd2015/p/9612568.html
