标签:简单的 tle 怎么 开始 margin ext 地图 允许 增加
//注1:Mind & Hand,MIT校训,这里指的理解与实现(动脑也动手)
//注2:博文分为两部分:(1)理解部分,为参考其他优秀博文的摘要梳理;(2)代码部分,是C++代码实现的,源码来源GitHub开源代码。
我一名2018级的Postgraduate新生,路径规划算法的初学者,这里的理解主要参照资深IT博主“莫水千流”的博客原文(链接附在本部分内容的结尾处),做一些梳理和笔记摘要,加深对于A星寻路算法的理解。学习从模仿开始。
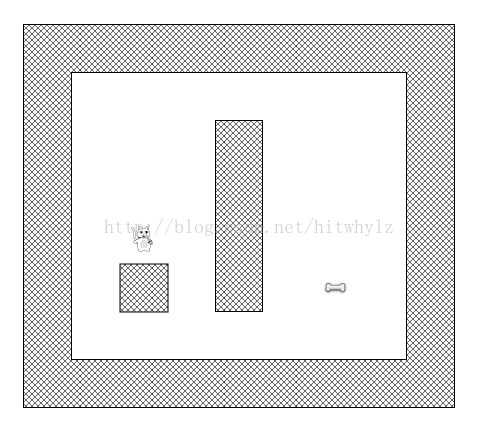
原始问题:懒惰的“小猫”为了寻找到达“骨头”的最短路径,它应该怎么走?
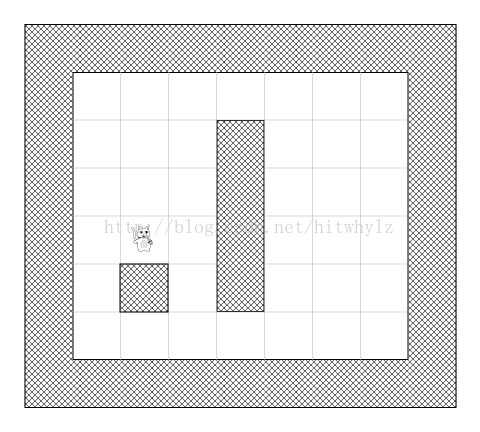
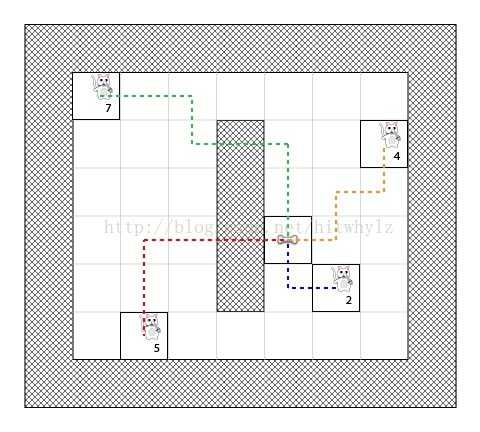
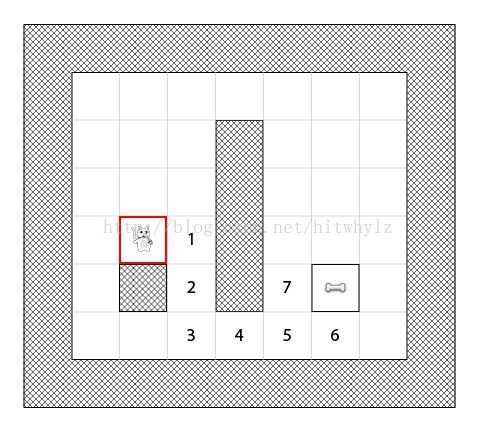
建立模型:寻路的第一步,把“原始问题的区域”(左图)简化成“容易控制的搜索区域”(右图)。
例如,我们可以将搜索区域划分成“像素点(pixel)”,"划分粒度”的大小取决于具体问题的需要;“划分粒度“的形状可以选择正方形(三角形或者六边形等),这里正方形最简单区符合需求。
接着,搜索区域可以简单的用一个地图大小的二维数组去表示。所以如果是25*25方块大小的地图,我们的搜索区域将会是一个有625 个正方形的数组。在这个简单的例子中,6*7个方块 = 42 个方块),所以我们使用一个大小为6*7=42的二维数组来表示搜索区域。
既然我们创建了一个简单的搜索区域,我们来讨论下A星算法的工作原理吧。
除了懒惰之外,我们的猫没有好的记忆力,所以它需要两个列表:
猫首先在closed列表中添加当前位置(我们把这个开始点称为点 “A”)。然后,把所有与它当前位置相邻的可通行小方块添加到open列表中。
下图是猫在某一位置时的情景(绿色代表open列表):
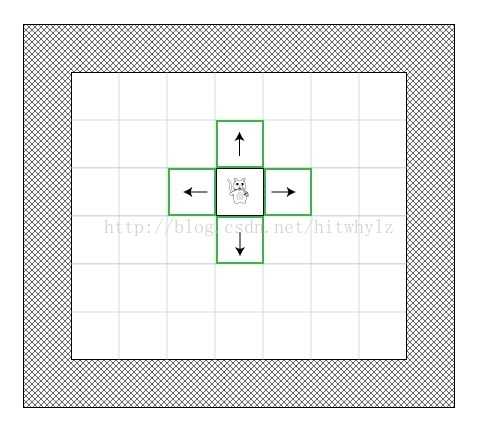
现在猫需要判断在这些选项中,哪项才是最短路径,但是它要如何去选择呢?
在A星寻路算法中,通过给每一个方块一个和值,该值被称为路径增量。让我们看下它的工作原理!
你也许会对“移动量”感兴趣。在游戏中,这个概念很简单 – 仅仅是方块的数量。
然而,在游戏中你可以对这个值做调整。例如:
这就是大概的意思 – 现在让我们详细分析下如何计算出G和H值。
G是从开始点A到达当前方块的移动量(在本游戏中是指方块的数目)。
为了计算出G的值,我们需要从它的前继(上一个方块)获取,然后加1。所以,每个方块的G值代表了从点A到该方块所形成路径的总移动量。
例如,下图展示了两条到达不同骨头的路径,每个方块都标有它的G值:
H值是从当前方块到终点的移动量估算值(在本游戏中是指方块的数目)。
移动量估算值离真实值越接近,最终的路径会更加精确。如果估算值停止作用,很可能生成出来的路径不会是最短的(但是它可能是接近的)。这个题目相对复杂,莫水千流博主在原博客的末尾提供了一个网络链接,对它做了很好的解释。
为了让它更简单,我们将使用“曼哈顿距离方法”(也叫“曼哈顿长”或者“城市街区距离”),它只是计算出距离点B,剩下的水平和垂直的方块数量,略去了障碍物或者不同陆地类型的数量。
例如,下图展示了使用“城市街区距离”,从不同的开始点到终点,去估算H的值(黑色字):
既然你知道如何计算每个方块的和值(我们将它称为F,F=G+H), 我们来看下A星算法的原理。
猫会重复以下步骤来找到最短路径:
如果你对它的工作原理还有点疑惑,不用担心 – 我们会用例子一步步介绍它的原理。
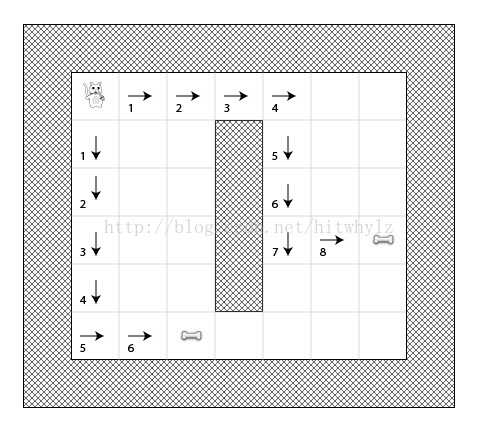
让我们看下我们的懒猫到达骨头的行程例子。
在下图中,我根据以下内容,列出了公式F = G + H 中的每项值:
同时,箭头指示了到达相应方块的移动方向。
最后,在每一步中,红色方块表示closed列表,绿色方块表示open列表。
好的,我们开始吧!
#第 1步
第一步,猫会确定相对于开始位置(点A)的相邻方块,计算出他们的F和值,然后把他们添加到open列表中:
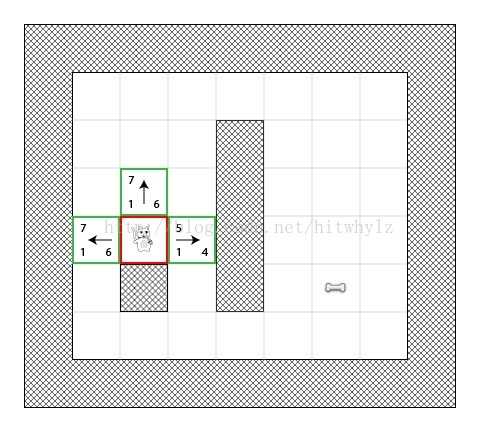
你会看到每个方块都列出了H值(有两个是6,一个是4),注意F值(左上角)是G(左下角)值和H(右下脚)值的和。
同时把小猫所在的块(走过了)添加到closed列表(红色方块表示)。
#第 2 步
在第二步中,猫选择了F和值最小的方块,把它添加到closed列表中,然后检索它的相邻方块的相关数值。
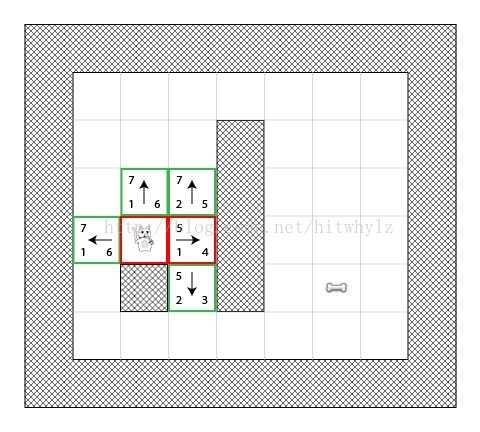
现在你将看到拥有最小路径增量的是F值为5的方块。猫尝试添加所有相邻的方块到open列表中(然后计算他们的和值),除了猫自身的方块不能添加以外(因为它已经被添加到了closed列表中)或者它是墙壁方块(因为它不能通行)。
注意被添加到open列表的两个新方块,他们的G值都增加了1,因为他们现在离开始点有2个方块远了。你也许需要再计算下“城市街区距离”,以确保你理解了每个新方块的H值。
#第 3 步
再次,我们选择了有最小F和值(5)的方块,继续重复之前的步骤:
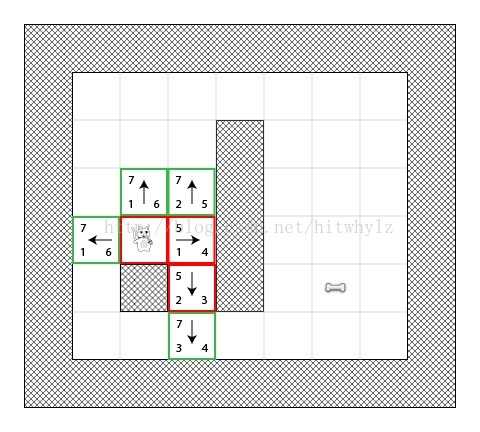
现在,只有一个可能的方块被添加到open列表中了,因为已经有一个相邻的方块在close列表中,其他两个是墙壁方块。
#第 4 步
现在我们遇到了一个有趣的情况。正如你之前看到的,有4个方块的F和值都为7 ——我们要怎么做呢?!
有几种解决方法可以使用,但是最简单(快速)的方法是一直跟着最近被添加到open列表中的方块。现在继续沿着最近被添加的方块前进。
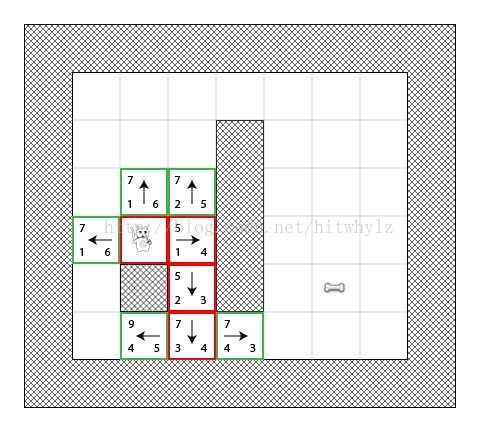
这次有两个可通过的相邻方块了,我们还是像之前那样计算他们的和值。
#第 5步
接着我们选择了最小和值(7)的方块,继续重复之前的步骤:
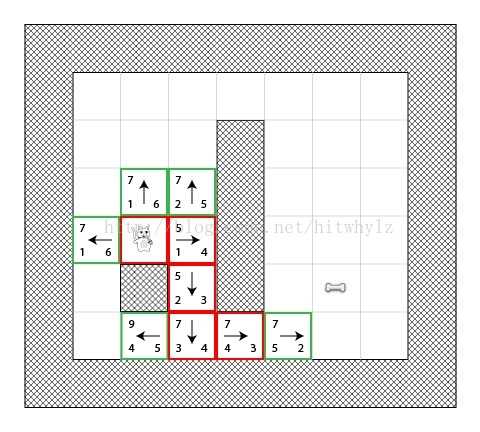
我们越来越接近终点了!
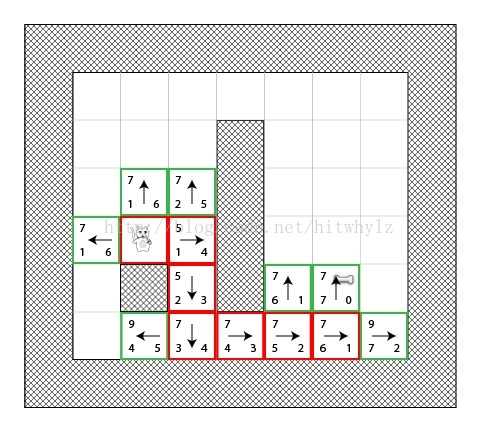
#第 6步
你现在训练有素了!我打赌你能够猜出下一步是下面这样子了:
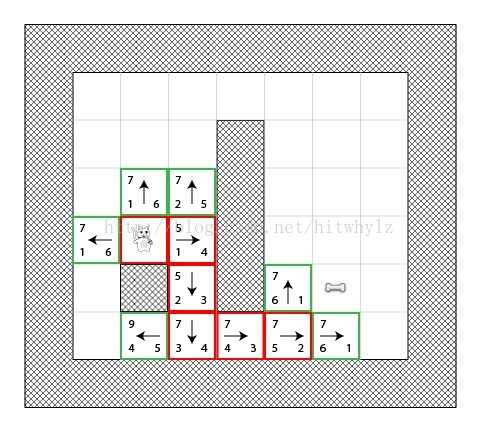
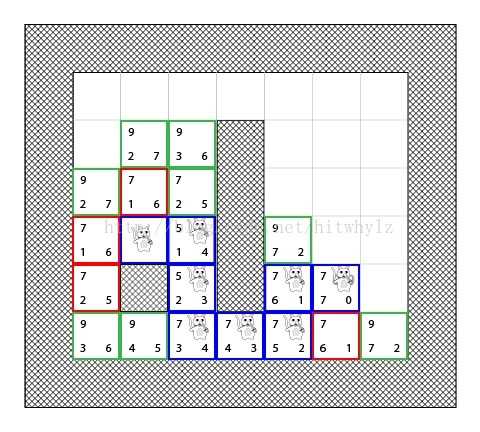
我们差不多到终点了,但是这次你看到有两条到达骨头的最短路径提供给我们选择:
在我们的例子中,有两条最短路径:
选择哪一条其实没关系,现在到了真正用代码实现的时候了。
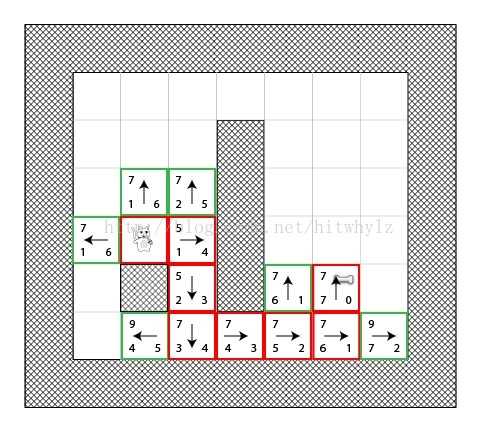
#第 7 步
让我们从其中一块方块,再重复一遍步骤吧:
终于,骨头在open列表中了!
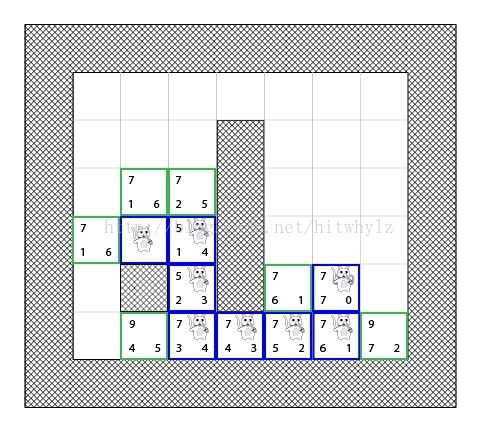
#第 8 步
现在目标方块在open列表中了,算法会把它添加到closed列表中:
然后,算法要做的所有事情就是返回,计算出最终的路径!
在上面的例子中,我们看到当猫在寻找最短路径时,它经常选择更好的方块(那个在它的未来最短路径上的方块)- 好像它是一只有远见的猫!
但是如果猫是盲目的,并且总是选择第一个添加到它的列表上的方块,会发生什么事情?
下图展示了所有在寻找过程中会被使用到的方块。你会看到猫在尝试更多的方块,但是它仍然找到了最短路径(不是之前的那条,而是另一条等价的):
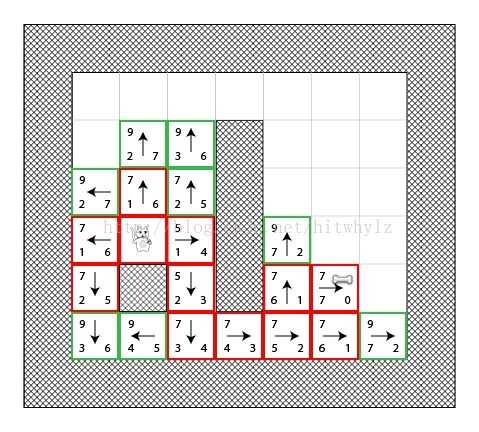
此时,图中的红色方块不代表最短路径,它们只是代表在某个时候被选择为“S”的方块。
我建议你看着上面的图,并且尝试过一遍步骤。这次无论你看到哪个相邻的方块,都选择“最坏”的方式去走。你会发现最后还是找到了最短路径!
所以你可以看到跟随一个“错误的”方块是没有问题的,你仍然会在多次重复尝试后找到最短路径。
所以在我们的实现中,我们会按照以下的算法添加方块到open列表中:
下面是从原路返回的示意图:
最短的路径是从终点开始,一步步返回到起点构成的(例子:在终点我们可以看到箭头指向右边,所以该方块的前继在它的左边)。
附:
https://www.cnblogs.com/zhoug2020/p/3468167.html A星寻路算法介绍
原博客链接地址,博主--莫水千流。
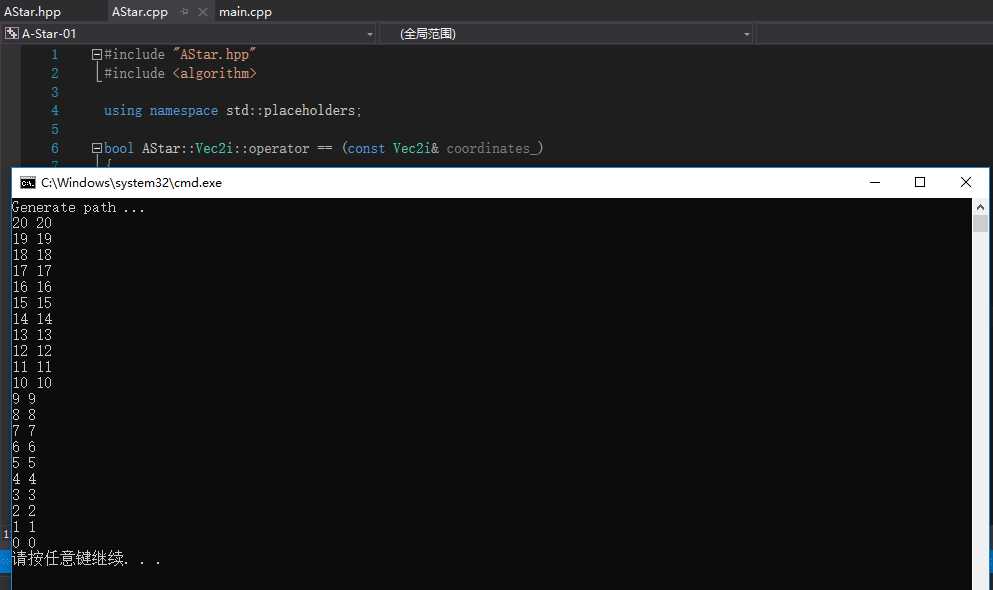
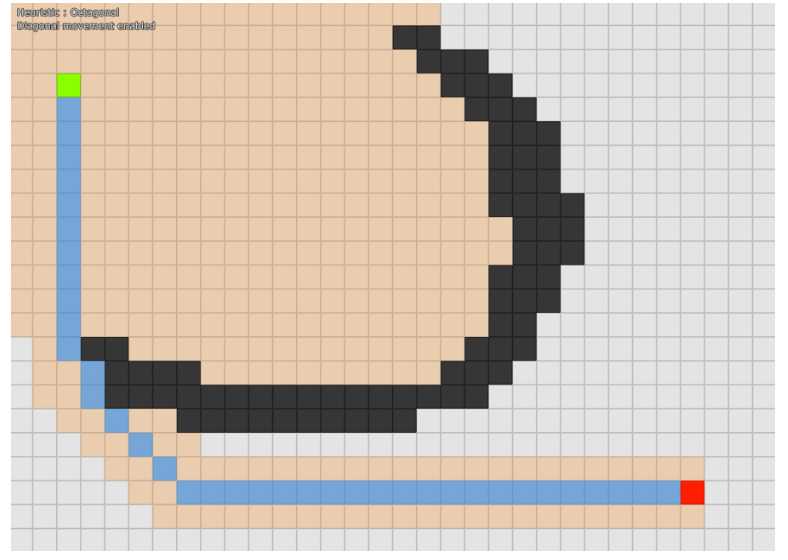
代码是下载的Github上的开源代码,我下载下来,验证是可以成功运行的(截图如下)。目前我还不能完全读懂整个代码,所以无法在文章中进行讲解,后期C++功底成长起来,应该可以完全理解的。
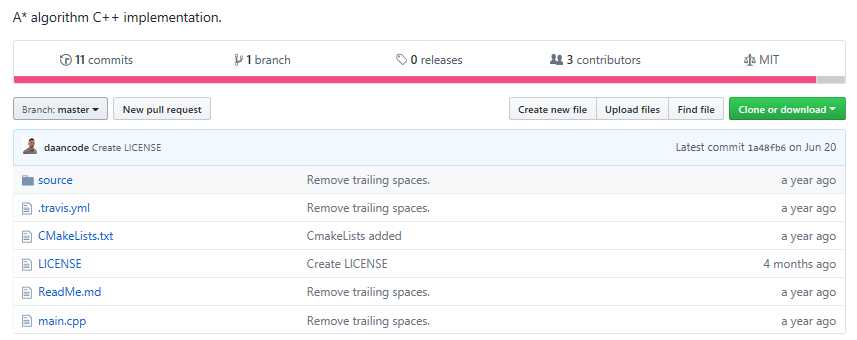
下面的截图是Github的代码作者ddancode(另一个大牛)的展示页,大家可以自行下载代码,尝试分析和阅读。我还是在刚刚起步的路上。

附:
https://github.com/daancode/a-star “完整代码zip”——github下载地址
标签:简单的 tle 怎么 开始 margin ext 地图 允许 增加
原文地址:https://www.cnblogs.com/paulprayer/p/9829336.html