标签:isnull 代码 tde cores 分享图片 半径 ret exce 拓扑
需要最新源码,或技术提问,请加QQ群:538327407,由于源码在不断完善,会在之后同步到AI开源项目中
一、需求
需要针对艺术品 局部和全图进行相识度比对,从而识别图片的真伪。
二、技术思路
通过AI 算法,查找两张图片的相似点,特征点的比对比例分析,如果达到90% 以上,默认相同或者相识。
三、技术储备
FREAK算法
简介
FREAK算法是2012年CVPR上《FREAK: Fast Retina Keypoint》文章中,提出来的一种特征提取算法,也是一种二进制的特征描述算子。
它与BRISK算法非常相似,个人觉得就是在BRISK算法上的改进,关于BRISK算法详见上一篇博文:BRISK特征提取算法。FREAK依然具有尺度不变性、旋转不变性、对噪声的鲁棒性等。
FREAK算法
采样模式
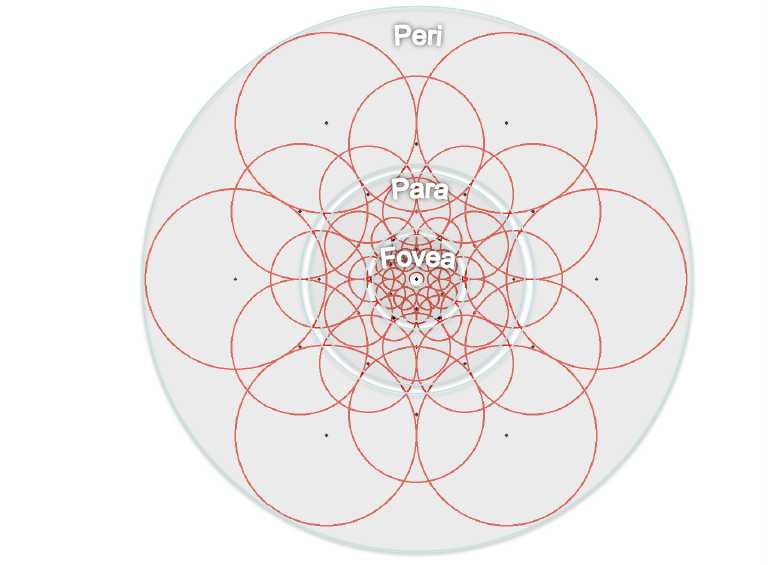
在BRISK算法中,采样模式是均匀采样模式(在同一圆上等间隔的进行采样);FREAK算法中,采样模式发生了改变,它采取了更为接近于人眼视网膜接收图像信息的采样模型。图中展示了人眼视网膜拓扑结构,Fovea区域主要是对高进度的图像信息进行处理,Para主要是对低精度的图像信息进行处理。采样点为:6、6、6、6、6、6、6、1,那个1是特征点。
表示采样点对Pa中前一个采样点的像素值,同理,表示后一个采样点的像素值。
当然得到特征点的二进制描述符后,也就算完成了特征提取。但是FREAK还提出,将得到的Nbit二进制描述子进行筛选,希望得到更好的,更具有辨识度的描述子,也就是说要从中去粗取精。(也就是降维)
1、建立矩阵D,D的每一行是一个FREAK二进制描述符,即每一行有N个元素;在上图的采样模式中公有43个采样点,可以产生N=43*(43-1)/2=903个采样点对,也就是说矩阵D有903行列(修改于:2015-11-15);
2、对矩阵D的每一列计算其均值,由于D中元素都是0/1分布的,均值在0.5附近说明该列具有高的方差;
3、每一列都有一个均值,以均值最接近0.5的排在第一位,均值离0.5越远的排在越靠后,对列进行排序;
4、选取前512列作为最终的二进制描述符。(也可以是256、128、64、32等)
小结:最原始的二进制长度为903,当然这包含了许多冗余或粗糙的信息,所以根据一定的方法取N个二进制长度,方法是建立矩阵D。假如提取到228个特征点,那么矩阵D应该是228行*903列,然后经过计算均值,将每个列重新排序,选取前N列,这个矩阵D就是228*N的矩阵了。当然这个N我在文中写得是512,你也可以是256、128、64、32这些都是可以的。 最终D的每一行仍然是一个特征点的描述符,只是更短小精悍而已,即降低了维度。(添加于:2016-01-11)
由于FREAK描述符自身的圆形对称采样结构使其具有旋转不变性,采样的位置好半径随着尺度的变化使其具有尺度不变性,对每个采样点进行高斯模糊,也具有一定的抗噪性能,像素点的强度对比生成二进制描述子使其具有光照不变性。因此由上述产生的二进制描述子可以用来进行特征匹配。在匹配之前,再补充一下特征点的方向信息。
特征方向
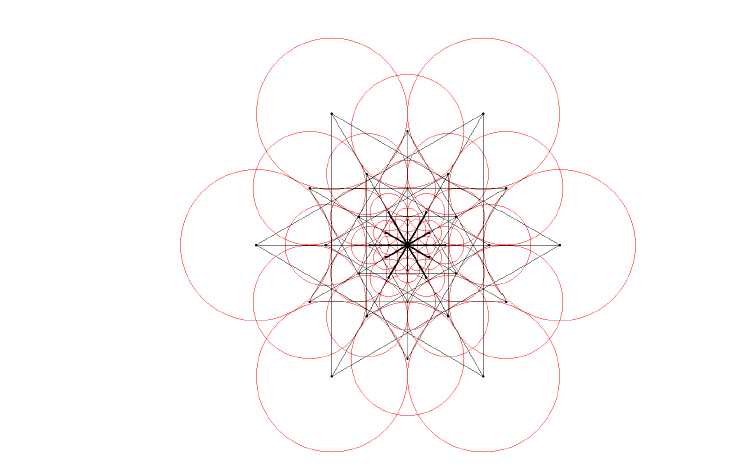
由于特征点周围有43个采样点,可产生43*(43-1)/2=903个采样点对,FREAK算法选取其中45个长的、对称的采样点对来提取特征点的方向,采样点对如下:
用O表示局部梯度信息,M表示采样点对个数,G表示采样点对集合,Po表示采样点对的位置,则:

同BRISK算法,可得到特征点的方向。
特征匹配
在特征描述中,我们得到了512bit的二进制描述符,该描述符的列是高方差——>低方差的排列,而高方差表征了模糊信息,低方差表征了细节信息,与人眼视网膜相似,人眼先处理的是模糊信息,再处理细节信息。因此,选取前128bit即16bytes进行匹配(异或),若两个待匹配的特征点前16bytes距离小于设定的阈值,则再用剩余的位信息进行匹配。这种方法可以剔除掉90%的不相关匹配点。注意:这里的16bytes的选取是建立在并行处理技术(SIMD)上的,并行处理技术处理16bytes与处理1bytes的时间相同;也就是说,16bytes并不是固定的,如果你的并行处理技术能处理32bytes与处理1bytes的时间相同的话,那么你也可以选取前32bytes。
技术实现
代码
public IEnumerable<TFeature>[] Transform(Bitmap[] input) { return Transform(input, new IList<TFeature>[input.Length]); } public IEnumerable<TFeature>[] Transform(Bitmap[] input, IEnumerable<TFeature>[] result) { for (int i = 0; i < input.Length; i++) result[i] = Transform(input[i]); return result; }
private void btnFreak_Click(object sender, EventArgs e) { if (string.IsNullOrWhiteSpace(label1.Text) || string.IsNullOrWhiteSpace(label2.Text)) { MessageBox.Show("请先上传比对图片!"); return; } Concatenate concatenate1 = new Concatenate(img1); pictureBox.Image = concatenate1.Apply(img2); FastRetinaKeypointDetector freak = new FastRetinaKeypointDetector(); //获取两张图片的采样点 keyPoints1 = freak.Transform(img1); keyPoints2 = freak.Transform(img2); Bitmap img1mark = new PointsMarker(keyPoints1.Select(x => (IFeaturePoint)x).ToList()).Apply(img1); Bitmap img2mark = new PointsMarker(keyPoints2.Select(x => (IFeaturePoint)x).ToList()).Apply(img2); Concatenate concatenate2 = new Concatenate(img1mark); pictureBox.Image = concatenate2.Apply(img2mark); }
private void btnCorrelation_Click(object sender, EventArgs e) { if (keyPoints1 == null) { MessageBox.Show("Please, click FREAK button first! :-)"); return; } Thread t1 = new Thread(new ThreadStart(() => { this.Invoke(new Action(() => { lb_result.Text = "检测中......"; })); var matcher = new KNearestNeighborMatching<byte[]>(5, new Hamming()); IntPoint[][] matches = matcher.Match(keyPoints1, keyPoints2);//返回的结果值一般都是相同的,数组中 string result1 = (((decimal)matches[0].Count() / (decimal)keyPoints1.Count()) * 100).ToString("#0.00"); string result2 = (((decimal)matches[1].Count() / (decimal)keyPoints2.Count()) * 100).ToString("#0.00"); string tempString = string.Format("原图采样点:{0},对比图采样点:{1},匹配个数点:{2},{3},匹配比例:{4}%,{5}%", keyPoints1.Count(), keyPoints2.Count(), matches[0].Count(), matches[1].Count(), result1, result2); this.Invoke(new Action(() => { lb_result.Text = tempString; lb_result.BackColor = Color.Azure; correlationPoints1 = matches[0]; correlationPoints2 = matches[1]; Concatenate concat = new Concatenate(img1); Bitmap img3 = concat.Apply(img2); PairsMarker pairs = new PairsMarker( correlationPoints1, // Add image1‘s width to the X points to show the markings correctly correlationPoints2.Apply(p => new IntPoint(p.X + img1.Width, p.Y))); pictureBox.Image = pairs.Apply(img3); })); })); t1.Start(); }
private IntPoint[][] match(IFeaturePoint<T>[] points1, IFeaturePoint<T>[] points2) { if (points1.Length == 0 || points2.Length == 0) throw new ArgumentException("Insufficient number of points to produce a matching."); bool swap = false; if (points2.Length > points1.Length) { var aux = points1; points1 = points2; points2 = aux; swap = true; } T[] features1 = new T[points1.Length]; for (int i = 0; i < features1.Length; i++) features1[i] = points1[i].Descriptor; T[] features2 = new T[points2.Length]; for (int i = 0; i < features2.Length; i++) features2[i] = points2[i].Descriptor; var knn = CreateNeighbors(features1); double[] scores = new double[features2.Length]; int[] labels = new int[features2.Length]; knn.Score(features2, ref labels, result: scores); int[] bestMatch = new int[points1.Length]; double[] bestScore = new double[points1.Length]; for (int i = 0; i < bestScore.Length; i++) bestScore[i] = Double.PositiveInfinity; for (int j = 0; j < labels.Length; j++) { int i = labels[j]; if (scores[j] > Threshold) { if (scores[j] < bestScore[i]) { bestScore[i] = scores[j]; bestMatch[i] = j; } } } var p1 = new List<IntPoint>(bestScore.Length); var p2 = new List<IntPoint>(bestScore.Length); for (int i = 0; i < bestScore.Length; i++) { IFeaturePoint<T> pi = points1[i]; if (bestScore[i] != Double.PositiveInfinity) { int j = bestMatch[i]; IFeaturePoint<T> pj = points2[j]; p1.Add(new IntPoint((int)pi.X, (int)pi.Y)); p2.Add(new IntPoint((int)pj.X, (int)pj.Y)); } } IntPoint[] m1 = p1.ToArray(); IntPoint[] m2 = p2.ToArray(); if (swap) return new IntPoint[][] { m2, m1 }; return new IntPoint[][] { m1, m2 }; }
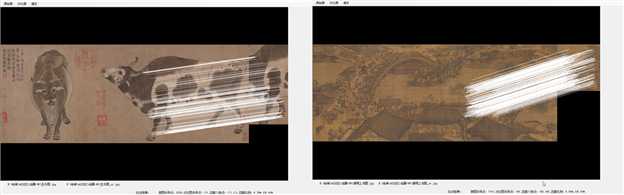
效果比对


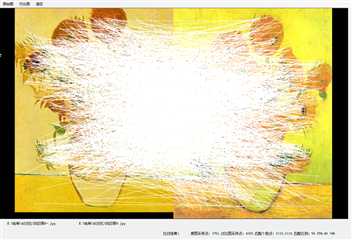



中国名画

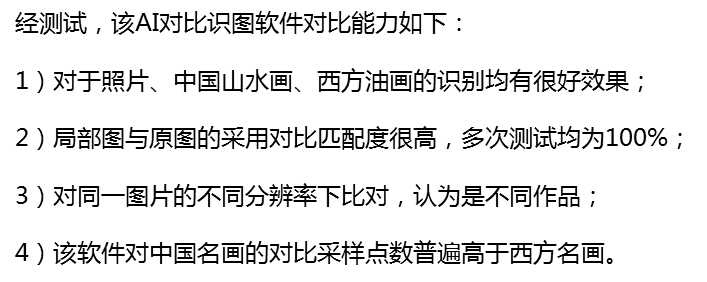
结论
标签:isnull 代码 tde cores 分享图片 半径 ret exce 拓扑
原文地址:https://www.cnblogs.com/linbin524/p/9829394.html