标签:cdc lib 高通 中间 glib ima 采集 abs 机器学习
关于傅里叶变换的作用,网上说的太过学术化,且都在说原理,已经如何编码实现,可能很多人有个模糊影响,在人工智能,图像识别,运动分析,机器学习等中,频谱分析成为了必备的手段,可将离散信号量转换为数字信息进行归类分析。
但频谱分析中,涉及到的信号处理知识对大部分软件开发的人来说,太过于晦涩难懂,傅里叶变换,拉普拉斯,卷积,模相,实数,虚数,复数,三角函数等等,已经能让软件工程师望而却步,造成懂知识的人无法开发,懂开发的人无法分析,而同时具备两种技能的人,除了专业的研究生博士,剩下的少之又少。
站在软件开发人员的角度,能否抛开这些晦涩难懂概念,进行纯软件方面的信号处理?这个问题可能没有答案,最好能够通过实践来证明。而且若是抛开这些概念,让那些有兴趣的开发人员学习到信号处理,频谱分析,先不管可不可能,光想想,其作用也是有的,至少“高深”的东西能够被用上了。
下面就以三轴加速器的实际应用开发为例,来讲一讲(限于个人水平,可能比较粗略)。
试下运动APP也有不少,不少APP开发人员就会接触到陀螺仪,加速器等,利用这些传感器进行行为分析,首先需要获取传感器的数据,将获取的数据输出到平面坐标图表中:
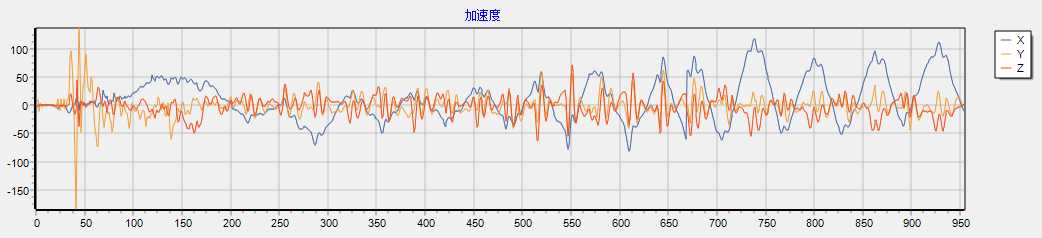
在上图中,采集频率为50Hz,即X轴每一个点为50分之1秒,可以看到前4秒(0-200)没有太明显走动,4秒后到12秒走动速度较慢,12秒走路稍微加快。在这里不得不感叹人脑简直是宇宙超级无敌,光看图表就能够直接知道行为,无法想象未来谁能够让人工智能能够超越人脑。
在软件开发中,我们要如何通过代码分析得到上面“人脑的分析结果“? 要直接上代码不是我的作风,百度可以搜到一篇腾讯的文章《利用三轴加速器的计步测算方法》,此文章的分析方法可以说大致能够理解,涉及到的计算方法却语焉不详,比如,在没有进行滤波前,上图的X轴波峰波谷并不平滑,可以看出每个大波峰上又有2个小波谷,如果以此来计算,得出来的步数误差非常大。
可能一些做过信号处理的人会说,做一个均值滚动滤波+低通滤波+高通滤波就差不多了,我只能说对于复杂的周期性信号分析是可行的,对于三轴加速器的步数计算来说,实际中并不存在什么周期性信号,人的上坡下坡走路非直线,时快时慢等动作都会加大分析难度。
先不说这么多了,拿到信号原始数据,马上进行傅里叶变换,Delphi可以使用FPC一个开源的库AlgLib,最新版好像不开源了且分为免费版和收费版,但codetyphon收录了以前的开源版本可以用。
alglib中关于快速傅里叶变换是在u_fft.pp文件中,delphi只把后缀pp改成pas就可以使用了。使用FFTC1D函数进行变换,其中N即为采集的数据量,当然实际中我们有时候采集了几十秒,而N的最佳范围是在128-2048范围(既充分又计算量不高),所以我们每10秒(50Hz即500个数据)进行一次傅里叶变换分析即可。
比如采集到的数据为[3.4, 4.1, 6.7, 3.1...],则如下代码:
var
A : TComplex1DArray;
I, N : Integer;
begin
N := 50*10 // 10秒
SetLength(A, N);
for I:=0 to N-1 do
begin
A[I].X:=I; //即时域的刻度
A[I].Y:=Data[nIdx]; //填上采集的数据
end;
FFTC1D(A);
//////////////////////////
// 到这里已经完成傅里叶变换,如何使用变换后的数据??
end;
这里先引用百科上的一段话来帮助理解下面代码:
假设FFT之后某点n用复数a+bi表示, 那么这个复数的模就是An=根号a*a+b*b, 相位就是Pn=atan2(b,a)。 根据以上的结果,就可以计算出n点(n≠1,且n<=N/2)对应的信号的表达式为:An/(N/2)*cos(2*pi*Fn*t+Pn),即2*An/N*cos(2*pi*Fn*t+Pn)。 对于n=1点的信号,是直流分量,幅度即为A1/N。 由于FFT结果的对称性,通常我们只使用前半部分的结果,即小于采样频率一半的结果。
经过变换后的复数数组A,即是变换结果,但并不是分析的数据,而是一个中间数据,由该数据可以得到模值和相位,根据傅里叶变换原理,模值计算如下:
// 对A数组每个点的复数求模,即实部和虚部平方和再开根号。 nAValue := Math.Power(Abs(A[I].X*A[I].X)+Abs(A[I].Y*A[I].Y), 0.5);
至于相位则是根据公式Pn=atan2(b,a)计算,但是频谱分析比较有用的是模值(主要是滤波),所以其他不管,当然幅度也有一定作用。
前面讲到使用10秒的数据进行计算,这样得到的傅里叶变换结果复数也有500个,由于傅里叶的对称性,我们只取0-250的结果来计算模值即可,因为251-500是对称的结果。
计算模值后再输出平面坐标图表,如下:
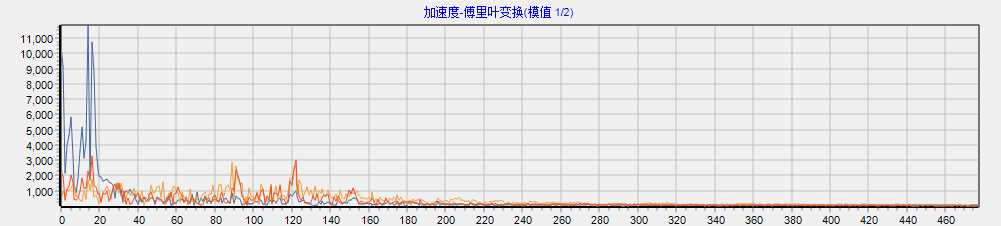
如上图,各种傅里叶变换文章中的结果图就出来了(请忽略图中的时间刻度与文章的10秒500个数据等相关性,因为我用的图是随便一段数据来的。)
看到上面的傅里叶变换结果图,会不会觉得悲剧才开始发生。没错,结果是出来了,但我们该如何分析呢?
【Delphi】如何在三轴加速器的频谱分析中使用FFT(快速傅里叶变换)算法
标签:cdc lib 高通 中间 glib ima 采集 abs 机器学习
原文地址:https://www.cnblogs.com/caibirdy1985/p/9896617.html