标签:bubuko 补充 结构 最简 form hle 算法 分享图片 htm
这篇文章是对射线法raycaster的补充,上一篇文章主要讲的是raycaster射线法拾取模型的原理,而这篇文章着重讲使用射线法要注意的地方。首先我们来看下图。
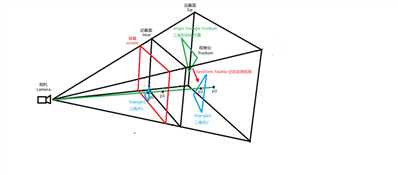
我来解释一下上图中的originTriangle,这就是Triangle2三角形第一次绘制在空间中的位置,而Triangle2当前的位置是经过一系列空间变换而来的(这些位置姿态变换大多是由用户鼠标交互产生),变换矩阵就是transformMatrix。这下就引出了本文第一个重点,那就是做raycaster的时候要保证线段碰撞模型的时候一定是模型当前所处的空间位置,即已经做过transformMatrix空间(姿态,位置)变换,否则线段如果和模型之前的初始化位置求交显然没有交点,就拾取失败了。这就是做raycaster要注意的第一个重点,即射线一定要和空间变换后的模型求交。
接下来我们再看一张图,请看下图。
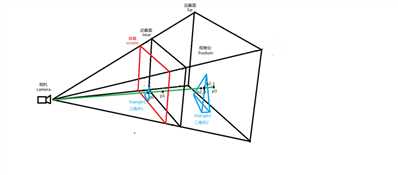
我们看到,射线和模型有2个交点,P2_0和P2_1,分别交四面体的前面于P2_0和交四面体的后面于P2_1。这就是我们要着重关注的本文第二个重点,即raycaster射线拾取模型过程中射线与单个模型有多个交点的问题。处理这个问题其实有很多办法,这里我们采用最简单的方式,就是距离相机(人眼)位置近者胜出的策略。计算交点的算法上一篇文章已经提到,这里不再赘述,但要说明的是,我们计算的每一个面在数据结构中都有自身模型父节点geometry,如果像上图一个四面体的geometry和射线产生了多个面相交,那我们就认为鼠标选中的是该模型geometry离相机(camera)(人眼)最近的交面上的交点。
好了,以上就是raycaster射线拾取模型要注意的地方,如有错误,希望读者斧正,欢迎诸位同学留言。如需转载本文,请注明出处:https://www.cnblogs.com/ccentry/p/9977021.html
标签:bubuko 补充 结构 最简 form hle 算法 分享图片 htm
原文地址:https://www.cnblogs.com/ccentry/p/9977021.html