标签:pack bubuko .net package image dep pen 配置 bash
最近新入职一家公司,是搞智能无人驾驶的,用的操作系统是Ubuntu和ros,之前没接触过ros系统,既然公司用那就必须的学习啊,话不多说先装它一个ros玩玩...
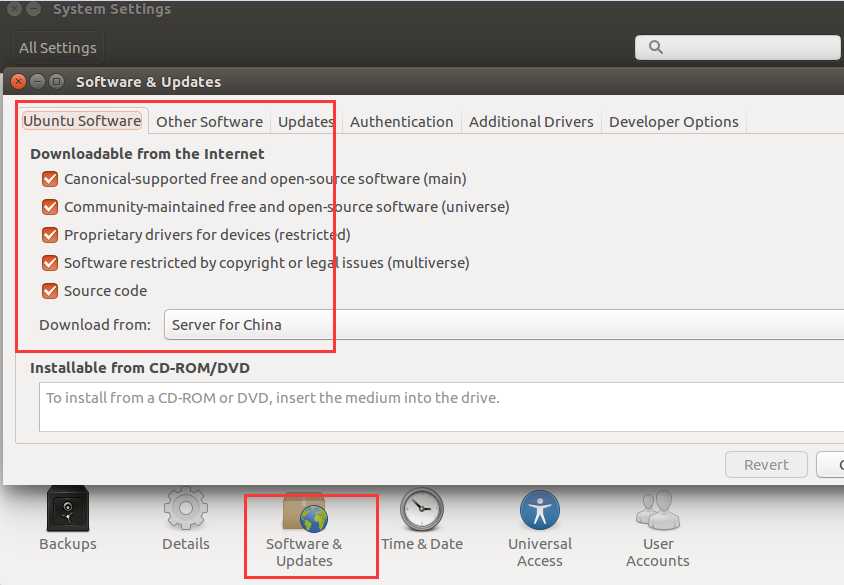
1.1Configure your Ubuntu repositories(配置您的Ubuntu存储库)
在系统设置中,找到软件与更新,将如下几个都勾选,允许其从互联网下载。
1.2 Setup your sources.list(设置你的计算机以接受packages.ros.org中的软件).
$ sudo sh -c ‘echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list‘
1.3 Set up your keys
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 Executing: /tmp/tmp.NItfnqYQnV/gpg.1.sh --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 gpg: requesting key B01FA116 from hkp server ha.pool.sks-keyservers.net gpg: key B01FA116: public key "ROS Builder <rosbuild@ros.org>" imported gpg: Total number processed: 1 gpg: imported: 1
1.4 Installation
$ sudo apt-get update
$ sudo apt-get install ros-kinetic-desktop-full
1.5 Initialize rosdep(初始化rosdep)
$ sudo rosdep init
$ rosdep update
1.6 Environment setup(配置环境)
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc $ source ~/.bashrc
1.7 Dependencies for building packages(安装building package的依赖)
$ sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
1.8测试ROS安装是否成功
标签:pack bubuko .net package image dep pen 配置 bash
原文地址:https://www.cnblogs.com/saneri/p/10105422.html