标签:stderr const 计算 就会 gray dem opencv2 names 运行
膨胀与腐蚀是数学形态学在图像处理中最基础的操作。在笔者之前的文章《图像的卷积(滤波)运算(一)——图像梯度》、《图像的卷积(滤波)运算(二)——高斯滤波》具体介绍了图像卷积\滤波的具体的概念与操作,图像的膨胀与腐蚀其实也是一种类似的卷积操作。其卷积操作非常简单,对于图像的每个像素,取其一定的邻域,计算最大值/最小值作为新图像对应像素位置的像素值。其中,取最大值就是膨胀,取最小值就是腐蚀。
在OpenCV中实现了图像膨胀的函数dilate(),可以直接调用:
Mat img = imread(imagename, IMREAD_GRAYSCALE);
if (img.empty())
{
fprintf(stderr, "Can not load image %s\n", imagename);
return -1;
}
//OpenCV方法
Mat dilated_cv;
dilate(img, dilated_cv, Mat());dilate()函数第一个参数表示输入影像,第二个参数表示输出影像,第三个表示一个默认的核,在3X3的范围内寻找最大值。
在一般的图像处理时,图像读写是由专门的组件进行读取的。这这里仍然使用OpenCV进行读取,以为增加复杂性。而在CV::Mat类中,提供了at()函数访问某一行某一列的像素值,可以通过at()函数去访问每一个像素的领域。
与之前OpenCV实现的一样,对于每一个像素,遍历以其像素位置为中心的3X3邻域,取最大值作为新图像对应位置的像素值。
其具体实现如下:
//从文件中读取成灰度图像
const char* imagename = "D:\\Data\\imgDemo\\lena.jpg";
Mat img = imread(imagename, IMREAD_GRAYSCALE);
if (img.empty())
{
fprintf(stderr, "Can not load image %s\n", imagename);
return -1;
}
//自定义方法
Mat dilated_my;
dilated_my.create(img.cols, img.rows, CV_8UC1);
for (int i = 0; i < img.rows; ++i)
{
for (int j = 0; j < img.cols; ++j)
{
//uchar minV = 255;
uchar maxV = 0;
//遍历周围最大像素值
for (int yi = i-1; yi <= i+1; yi++)
{
for (int xi = j-1; xi <= j+1; xi++)
{
if (xi<0||xi>= img.cols|| yi<0 || yi >= img.rows)
{
continue;
}
//minV = (std::min<uchar>)(minV, img.at<uchar>(yi, xi));
maxV = (std::max<uchar>)(maxV, img.at<uchar>(yi, xi));
}
}
dilated_my.at<uchar>(i, j) = maxV;
}
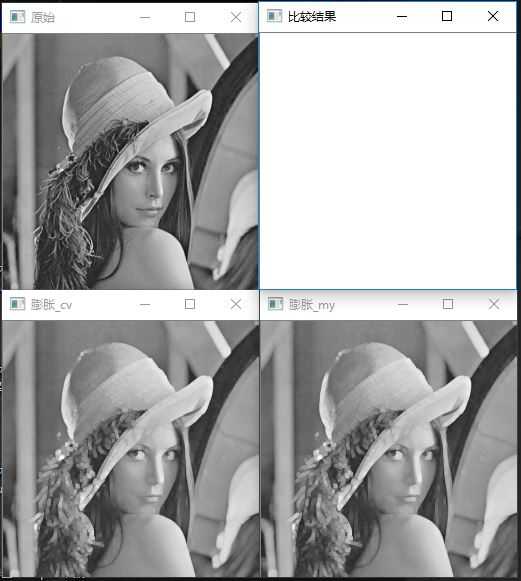
} 为了验证自己的算法是否正确,可以通过把两者膨胀的结果通过compare()函数进行比较。compare()函数会逐个比较两者的像素值,如果相同就会返回255(白色),如果不相同就会返回0(黑色)。整个过程的具体实现如下:
#include <iostream>
#include <algorithm>
#include <opencv2\opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
//从文件中读取成灰度图像
const char* imagename = "D:\\Data\\imgDemo\\lena.jpg";
Mat img = imread(imagename, IMREAD_GRAYSCALE);
if (img.empty())
{
fprintf(stderr, "Can not load image %s\n", imagename);
return -1;
}
//OpenCV方法
Mat dilated_cv;
dilate(img, dilated_cv, Mat());
//自定义方法
Mat dilated_my;
dilated_my.create(img.cols, img.rows, CV_8UC1);
for (int i = 0; i < img.rows; ++i)
{
for (int j = 0; j < img.cols; ++j)
{
//uchar minV = 255;
uchar maxV = 0;
//遍历周围最大像素值
for (int yi = i-1; yi <= i+1; yi++)
{
for (int xi = j-1; xi <= j+1; xi++)
{
if (xi<0||xi>= img.cols|| yi<0 || yi >= img.rows)
{
continue;
}
//minV = (std::min<uchar>)(minV, img.at<uchar>(yi, xi));
maxV = (std::max<uchar>)(maxV, img.at<uchar>(yi, xi));
}
}
dilated_my.at<uchar>(i, j) = maxV;
}
}
//比较两者的结果
Mat c;
compare(dilated_cv, dilated_my, c, CMP_EQ);
//显示
imshow("原始", img);
imshow("膨胀_cv", dilated_cv);
imshow("膨胀_my", dilated_my);
imshow("比较结果", c);
waitKey();
return 0;
}其运行结果如下所示。可以发现最后的比较结果是一张白色的图像,说明自己实现的算法是正确的。
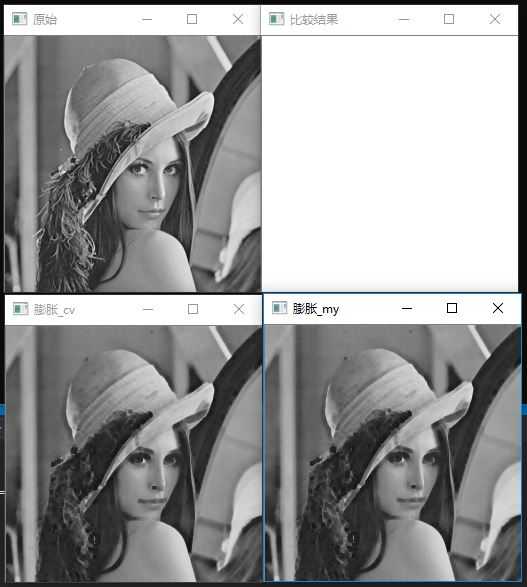
同样的办法可以实现图像腐蚀的过程,只要将求局部最大值改成局部最小值就可以了。具体实现过程如下:
#include <iostream>
#include <algorithm>
#include <opencv2\opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
//从文件中读取成灰度图像
const char* imagename = "D:\\Data\\imgDemo\\lena.jpg";
Mat img = imread(imagename, IMREAD_GRAYSCALE);
if (img.empty())
{
fprintf(stderr, "Can not load image %s\n", imagename);
return -1;
}
//OpenCV方法
Mat eroded_cv;
erode(img, eroded_cv, Mat());
//自定义方法
Mat eroded_my;
eroded_my.create(img.cols, img.rows, CV_8UC1);
for (int i = 0; i < img.rows; ++i)
{
for (int j = 0; j < img.cols; ++j)
{
uchar minV = 255;
//uchar maxV = 0;
//遍历周围最大像素值
for (int yi = i-1; yi <= i+1; yi++)
{
for (int xi = j-1; xi <= j+1; xi++)
{
if (xi<0||xi>= img.cols|| yi<0 || yi >= img.rows)
{
continue;
}
minV = (std::min<uchar>)(minV, img.at<uchar>(yi, xi));
//maxV = (std::max<uchar>)(maxV, img.at<uchar>(yi, xi));
}
}
eroded_my.at<uchar>(i, j) = minV;
}
}
//比较两者的结果
Mat c;
compare(eroded_cv, eroded_my, c, CMP_EQ);
//显示
imshow("原始", img);
imshow("膨胀_cv", eroded_cv);
imshow("膨胀_my", eroded_my);
imshow("比较结果", c);
waitKey();
return 0;
}其运行结果如下:
标签:stderr const 计算 就会 gray dem opencv2 names 运行
原文地址:https://www.cnblogs.com/charlee44/p/10633890.html