标签:跟踪 噪声 lan 这不 0.11 随机 idt die 说明
识别一副图中的sudden change
图像中发生强烈变化的地方
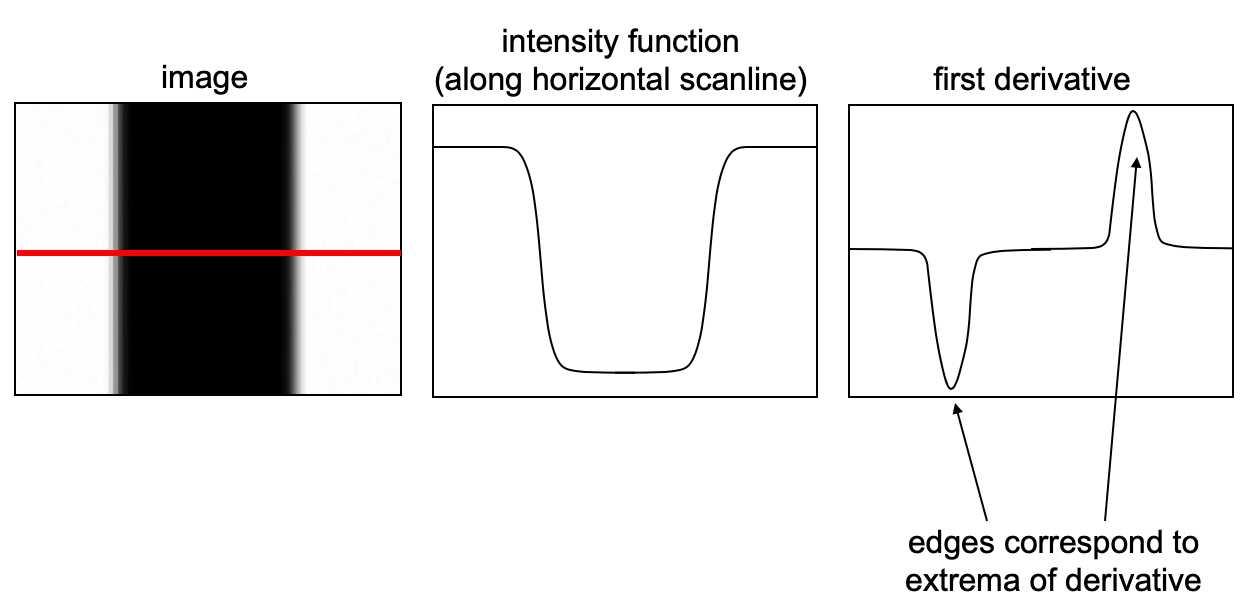
类比于积分,可以使用有限差分来表现变化
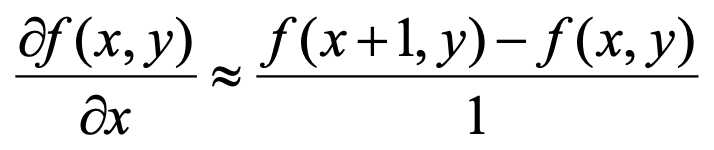
图像的梯度: 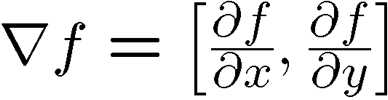
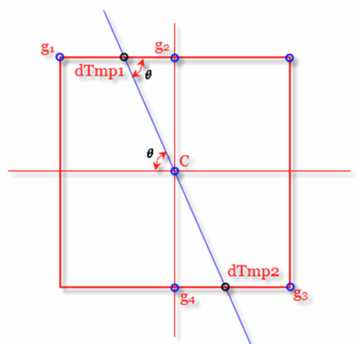
梯度的幅角 : 
边缘的强度:
使用公式: $v = 0.299R + 0.587G + 0.114B $
由于原图中存在许多随机噪声,在求导过程中,可能会产生很大的变化,但这些噪声并不是我们要求的边缘。所以需要通过高斯模糊去除高频部分。
图像梯度幅值矩阵中的元素值越大,说明图像中该点的梯度值越大,但这不能说明该点就是边缘。Canny算法中
Canny算法中采用双阈值法,根据高阈值得到一个边缘图像,这样一个图像含有很少的假边缘,但是由于阈值较高,产生的图像边缘可能不闭合,所以需要低阈值。高于高阈值的称为强边缘,介于高阈值和低阈值之间的称为弱边缘
在高阈值图像中把边缘链接成轮廓,当到达轮廓的端点时,该算法会在断点的8领域中寻找高于低阈值的点,形成轮廓。(即将在强边缘像0素八领域内的弱边缘像素认为是强边缘像素)
Opencv中的Canny函数
函数原型:
cv2.Canny(image, thresholod, threshold2, apertureSize, L2gradient) -> edges
image:输入的图像,要求是灰度图
thresholod1:低阈值,用来找出弱边缘
thresholod2:高阈值,用来找出强边缘
apertureSize:sobel模版的尺寸
L2gradient:采用L1范式计算算子还是L2范式计算算子
// edge detection
标签:跟踪 噪声 lan 这不 0.11 随机 idt die 说明
原文地址:https://www.cnblogs.com/tempestT/p/10894905.html