标签:智能 灵敏度 tin 立足 特定 sig 状态 _for 核心
GPIO18号口。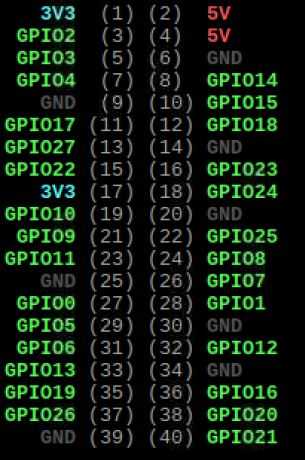
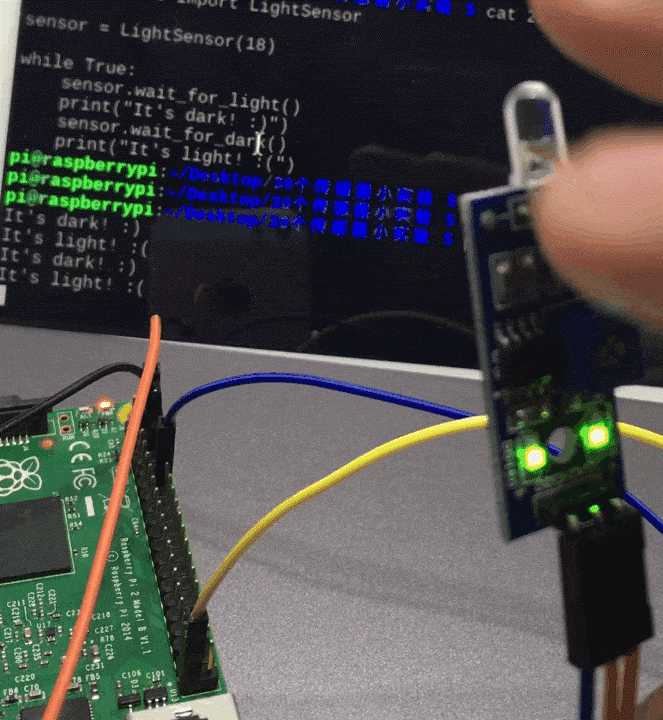
from gpiozero import LightSensor
sensor = LightSensor(18)
while True:
sensor.wait_for_light()
print("It's dark! :)")
sensor.wait_for_dark()
print("It's light! :(")wait_for_light()和wait_for_dark()这两个函数,手遮挡住光线的时候,显示"It‘s dark! :)",手拿开之后,显示"It‘s light! :("。from gpiozero import LightSensor, LED
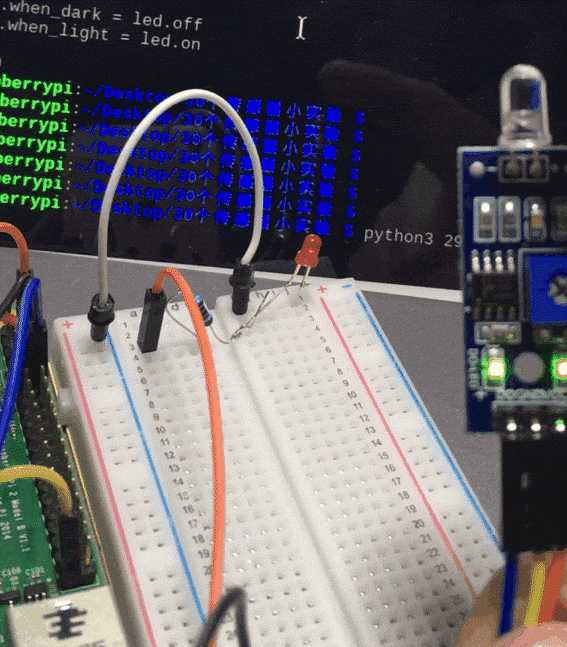
from signal import pause
sensor = LightSensor(18)
led = LED(17)
sensor.when_dark = led.off
sensor.when_light = led.on
pause()sensor的状态直接提供给led,这样光线传感器检测到亮光的时候led熄灭,检测不到光线的时候,led点亮。好了,本次介绍就到这里,本文收录在我的《手把手教你玩树莓派》系列教程,立足于普及树莓派搭配人工智能、物联网和机器人的玩法,想要跟我一起学习的童鞋可以加我微信/微博ID:asukafighting,也可以直接看教程:https://github.com/asukafighting/RaspberrypiHandbyHand
标签:智能 灵敏度 tin 立足 特定 sig 状态 _for 核心
原文地址:https://www.cnblogs.com/asukafighting/p/10922305.html