标签:init current mod 修改 img 正是 比较 float 递增
HashMap只是相对线程安全,如果出现数据竞争就抛出fail-fast;HashTable则将每个操作都上锁,如果有耗时的操作,那么后续的操作均会被阻塞,大大降低程序的吞吐率。而ConcurrentHashMap正是为了解决这样一个问题而出现的。
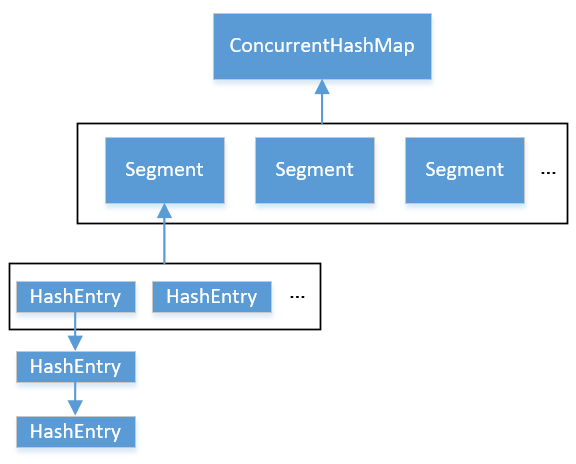
ConcurrentHashMap和HashMap的数据结构如下所示:
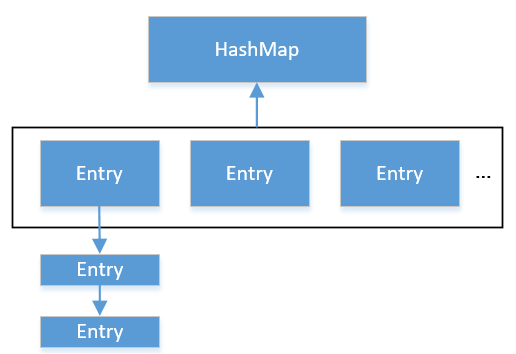
HashMap会持有一个Entry数组,每个Entry都是链表的结点,每次进行修改时,先查找key对应的hash值,找到BucktIndex,在遍历链表查看key是否相等。
ConcurrentHashMap会持有一个Segment数组,每个segment会持有一个HashEntry的数组,HashEntry又可以串成链表。每次进行写操作时,只需要加锁一个Segment即可,这就是分段加锁技术。相比HashMap,ConcurrentHashMap的修改就会比较费劲:首先要通过哈希key定位SegmentIndex,再对hash值进行再哈希获取BucketIndex,找到对应的Bucket,就可以进行和HashMap一样的操作,即遍历链表。
ConcurrentHashMap需要了解一些初始参数:
这里摘抄了一段初始化的代码,省略了一些不必要的代码:
public ConcurrentHashMap(int initialCapacity,
float loadFactor, int concurrencyLevel) {
// 偏移量
int sshift = 0;
// segment数组的长度
int ssize = 1;
// 找到一个最适合的 二的N次方 的长度
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1;
}
// segment偏移量,后面定位的时候需要用到
this.segmentShift = 32 - sshift;
// segment数组的长度
this.segmentMask = ssize - 1;
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
// 获取capacity的倍数
int c = initialCapacity / ssize;
// 保证持有的HashEntry大于等于initialCapacity
if (c * ssize < initialCapacity)
++c;
// MIN_SEGMENT_TABLE_CAPACITY 为 2
int cap = MIN_SEGMENT_TABLE_CAPACITY;
while (cap < c)
cap <<= 1;
// 创建segment数组和第一个segment
Segment<K,V> s0 =
new Segment<K,V>(loadFactor, (int)(cap * loadFactor),
(HashEntry<K,V>[])new HashEntry[cap]);
Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize];
}先通过移位运算符,找到最小的大于concurrencyLevel的次数,对ssize进行移位、sshift进行递增。segmentShift为定位segment的便宜量,segmentMask为有效位数。ssize是segment数组的长度,通过initialCapacity / ssize均分可持有的HashEntry数组。最后创建segment,segment需要loadFactor,cap * loadFactor (threshold,判断HashEntry数组是否需要扩容的标准),HashEntry数组。
通过这一系列初始化,多多少少能感觉到它和HashMap的相似之处。
// ConcurrentHashMap.put()
public V put(K key, V value) {
Segment<K,V> s;
if (value == null)
throw new NullPointerException();
// 对key进行hash
int hash = hash(key);
// 定位Segment的位置,原理和取余有些类似
int j = (hash >>> segmentShift) & segmentMask;
// 获取对应的Segment
if ((s = (Segment<K,V>)UNSAFE.getObject(segments, (j << SSHIFT) + SBASE)) == null)
// 创建新的segment
s = ensureSegment(j);
// 将键值对放入对应的segment里面
return s.put(key, hash, value, false);
}// Segment.put()
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
// 先尝试加锁,加锁失败后进入scanAndLockForPut
// scanAndLockForPut可以理解为是查找对应hash值的Entry
// 如果没有就及时创建
HashEntry<K,V> node = tryLock() ? null :
scanAndLockForPut(key, hash, value);
V oldValue;
try {
HashEntry<K,V>[] tab = table;
// 根据hash值定位BucketIndex
int index = (tab.length - 1) & hash;
// 获取对应位置的Bucket
HashEntry<K,V> first = entryAt(tab, index);
for (HashEntry<K,V> e = first;;) {
if (e != null) {
// 该条件指 遍历链表
K k;
if ((k = e.key) == key ||
(e.hash == hash && key.equals(k))) {
oldValue = e.value;
if (!onlyIfAbsent) {
e.value = value;
++modCount;
}
break;
}
e = e.next;
}
else {
// 该条件指 对应位置的Bucket为空,需要创建这个位置的Bucket
if (node != null)
// 不存在该hash值的entry,这里将其新创建的entry设置为first
node.setNext(first);
else
// 不存在该hash值的entry,也没有新创建的entry,这里执行创建
node = new HashEntry<K,V>(hash, key, value, first);
// Bucket数组的长度增加
int c = count + 1;
// 判断是否达到阈值
if (c > threshold && tab.length < MAXIMUM_CAPACITY)
// 再hash,相当于扩容
rehash(node);
else
// 将node设置到对应的bucketIndex上
setEntryAt(tab, index, node);
++modCount;
count = c;
oldValue = null;
break;
}
}
} finally {
unlock();
}
return oldValue;
}put操作虽然会对共享变量进行写入操作,但是执行前会获取到排斥锁,保证同一时刻只有一个线程能修改共享变量。
ConcurrentHashMap在是否需要扩容方面 更优于HashMap,具体表现在,ConcurrentHashMap先检查此次插入是否会超出阈值,如果会就先执行扩容再进行插入;HashMap则是插入元素后判断是否已经达到容量,如果达到就进行扩容,但是这样很可能发生扩容后没有新元素的插入,这样就进行了一次无效的扩容。
ConcurrentHashMap扩容不会对整个容器进行扩容,而是针对某个segment进行扩容
public V get(Object key) {
Segment<K,V> s;
HashEntry<K,V>[] tab;
// 获取该key的hash值
int h = hash(key);
// 对应的segment的偏移量
long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
// 如果查找到对应的segment
if ((s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)) != null &&(tab = s.table) != null) {
// 找到对应的Buckt进行遍历
for (HashEntry<K,V> e = (HashEntry<K,V>) UNSAFE.getObjectVolatile
(tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE);
e != null; e = e.next) {
K k;
if ((k = e.key) == key || (e.hash == h && key.equals(k)))
return e.value;
}
}
return null;
}这里的操作不需要同步,因为Segment和HashEntry的值都是volatile类型,共享变量会对所有线程立刻可见。同一时间,volatile写 happens-before volatile读。
虽然前面讲到Segment的count变量是volatile,但是并不意味着将所有segment的volatile变量加在一起就是size了,因为volatile只保证单个操作是原子性的,所以无法保证多个volatile变量相加后,其中一个volatile不会发生改变。但是如果在统计size时,将所有segment的写操作(put、clean等)锁住,又显得低效。
实际上,Segment的前两次统计都先不加锁执行,如果统计前的modCount和统计后的modCount不一致,那么就判断统计size失败。失败次数超过两次后,size方法就会将所有的segment加锁。
《Java并发编程的艺术》之CouncurrentHashMap
标签:init current mod 修改 img 正是 比较 float 递增
原文地址:https://www.cnblogs.com/codeleven/p/10963007.html