标签:广度优先 最短路径算法 ima heap lock 最小 tar not 时间
针对
无权图可以使用深度优先和广度优先算法,有权图可以使用最短路径算法
Dijkstra(迪杰斯特拉算法): 在有向加权图中查找最短路径
注意: 该算法只适用于有向无环图, 不适用于负权边的情况
思路:
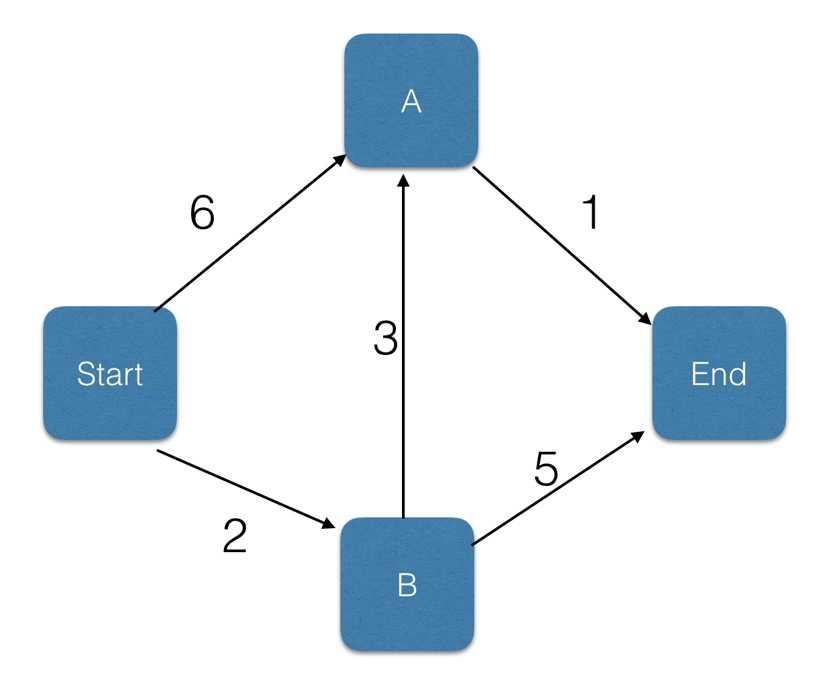
下表为要从起点到达终点, 数字为花费的时间
| 父节点 | 节点 | 花费 |
|---|---|---|
| start | A | 6 |
| start | B | 2 |
| B | A | 5 |
| B | end | 7 |
| A | end | 6 |
上图是按照以上步骤进行填充的
start的邻居节点A和B, 其中B的花费最少B节点的邻居节点A和end, 更新到A节点的开销A节点进行, 从A到end花费最小, 更新B到end的开销所以最小距离为start --> B --> A --> end
利用最小堆实现, 时间复杂度: O(e * logv), e是边的个数
# -*- coding:utf-8 -*-
'''
Dijkstra算法(最短路径算法)
- 适用于有向有权无环图
- 不适用于负权边的情况
'''
import heapq
class Graph(object):
def __init__(self):
self.graph = {}
def add_edge(self, start: str, end: str, distance: float):
self.graph.setdefault(start, {})
self.graph[start][end] = distance
def dijkstra(start: str, end: str, graph: dict) -> list:
visited = set() # 存储已经处理过的节点
costs = {start: 0}
queue = [(0, start)]
path = {} # 用于复原路径
while queue:
dis, min_node = heapq.heappop(queue)
if min_node == end:
break
if min_node not in visited:
visited.add(min_node)
neighbors = graph[min_node]
for i, j in neighbors.items():
new_dis = dis + j
if (i not in costs) or (new_dis < costs[i]):
costs[i] = new_dis
heapq.heappush(queue, (new_dis, i))
path[i] = min_node
res = []
key = end
while key != start:
res.append(key)
key = path[key]
res.append(start)
res.reverse()
return res
if __name__ == '__main__':
g1 = Graph()
g1.add_edge('start', 'a', 3)
g1.add_edge('start', 'b', 2)
g1.add_edge('b', 'a', 6)
g1.add_edge('b', 'end', 5)
g1.add_edge('a', 'end', 1)
assert dijkstra('start', 'end', g1.graph) == ['start', 'a', 'end']
g2 = Graph()
g2.add_edge('start', 'a', 5)
g2.add_edge('start', 'b', 2)
g2.add_edge('b', 'a', 1)
g2.add_edge('b', 'end', 5)
g2.add_edge('a', 'end', 1)
assert dijkstra('start', 'end', g2.graph) == ['start', 'b', 'a', 'end']

标签:广度优先 最短路径算法 ima heap lock 最小 tar not 时间
原文地址:https://www.cnblogs.com/zlone/p/11013606.html