标签:log mod 决定 tst 树莓派3 设定 不清楚 http 编码方式
之前买了个树莓派,刚买回来那会儿热情高涨,折腾了一段时间,然后就放哪吃灰了。前几天忽然想起来这个东西了,决定再玩玩儿,于是就从某宝上购买了一套步进电机、驱动板。东西收到后就开始折腾研究,下边来总结下折腾的结果吧。
先来说下都需要什么吧,树莓派的这一套都少不了,树莓派3b+主板、TF卡、树莓派电源、步进电机以及对应的驱动板、杜邦线6根(母对母),差不多就这么多吧。
首先,我们先看下树莓派的40个Pin都是什么功能吧!可以通过过树莓派的命令行窗口来查询,输入命令:
gpio readall
输出的结果是什么呢?见下图:
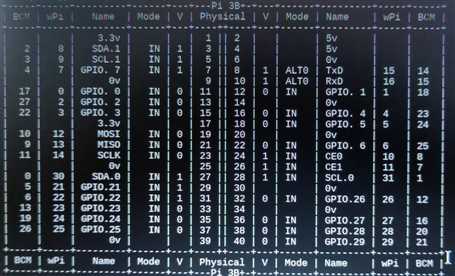
上边图中已经全部显示了40个GPIO的定义。下边是我从网上荡了一张图带颜色的图,看的会更清楚一些:

上图可以看到,这些Pin的编码方式有三种,分别是BOARD编码、BCM编码和WiringPi编码。这些都是什么含义呢?下边我们来一一说下:
上图也写了,就是物理引脚嘛,怎么编码的呢,就是在一列的引脚1、2,旁边的是3、4……直接上图吧,估计也说不清楚。由于我的主板已经安装到盒子里边了,固定也挺麻烦的,我就从网上荡一张来说事儿吧!

上图从左到右、从下到上以及进行编码,物理编码的起始值为1,从1到40。
BCM编码起始为是从0开始编码的,并且不像BOARD编码方式那样有序,他是根据功能进行编码的。具体的编码可以结合BOARD编码查看上边那张带颜色的表,从而确定每个引脚的功能。
这是另外一种编码方式,具体也没研究的太透,这里就简单略过吧,免得误人子弟了。
至于为什么要讲这写呢,首先是连接点击要用,另外就是编写代码要用。
看完编码当时,加下来我们再说下步进电机和驱动板电路吧。
我这个型号是28BYJ-48 5V DC,也没少好解释的,某宝上一搜一大把,而且还很便宜。

驱动板必须要跟点击匹配,否则必有一坏,就是看什么坏了。这个买的时候跟老板说,都懂,顺便一起买了,白菜价。

下来就说怎么用吧,步进电机根据自己的接口进行连接,由于我的就是那个匹配白色排针接口的,所以就不解释了,就算是傻子也接不错。
重点是怎么跟树莓派连接?IN1~IN4是控制信号输入接口;G接树莓派的GND引脚,不要问我为什么,就是这么接的,查看原理图得出来的结论。V呢接树莓派5V的引脚,不要问我为什么,记住就是这么接的就行了。
怎么显示他们的工作状态呢,看到上边的D1~D4了没,那就是等,给谁信号谁亮。
我就不上我具体的接线图了,因为盒子拆装太麻烦,并且我的杜邦线都是临时凑出来的,不好看。
下边我们说代码,由于我只会python,所以我就用python来编写,不要让我用C了什么的给你写个,不写,不会!
首先就是安装模块呗,装啥呢?装RPi.GPIO。我用的是python3,所以就在python3下安装的。如果你的出错了别找我,我也不会,因为我的没有出错。解决办法就是百度,网上一找一大堆。
怎么安装呢?
pip3 install RPi.GPIO
接着等提示安装成功就行了。
接下里就是写py代码了,由于我就是做了个简单的测试,所以代码也很简答,能让步进电机转起来。代码呢也是找的,因为他的比我的好看,并且也规范:
import RPi.GPIO as GPIO import time delay=2 #delay 2ms pin_4 = 4 pin_17 = 17 pin_23 = 23 pin_24 = 24 GPIO.setmode(GPIO.BCM) #设置引脚的编码方式 def init(): GPIO.setwarnings(False) GPIO.setup(pin_4, GPIO.OUT) GPIO.setup(pin_17, GPIO.OUT) GPIO.setup(pin_23, GPIO.OUT) GPIO.setup(pin_24, GPIO.OUT) def forward(delay): setStep(1, 0, 0, 0) time.sleep(delay) setStep(0, 1, 0, 0) time.sleep(delay) setStep(0, 0, 1, 0) time.sleep(delay) setStep(0, 0, 0, 1) time.sleep(delay) def setStep(w1, w2, w3, w4): GPIO.output(pin_4, w1) GPIO.output(pin_17, w2) GPIO.output(pin_23, w3) GPIO.output(pin_24, w4) def main(): init() while True: forward(int(delay) / 1000.0) main() # 调用main
至于代码呢,很简单简单看下吧,设置引脚的编码方式,这就是我上边为什么那么费劲的讲编码方式的原因了,虽然你可能还是看读懂。接下来就是设置引脚的输出,说白了就是你用树莓派的那几个脚来控制步进电机,这个引脚可以根据自己的喜好进行设置。下来就是设置点击怎么转,方向自己设定。
基本上呢就这么多,我也是第一次,什么都不懂,一切都来自网络。
参考链接
标签:log mod 决定 tst 树莓派3 设定 不清楚 http 编码方式
原文地址:https://www.cnblogs.com/ZN-225/p/11028987.html