标签:holo 记录 img cascade tps class pat target struct
首先在macOS上进行初次的程序执行:
// // main.cpp // Pra_cvHoughCircles // // Created by StarSky_MacBook Pro on 2019/7/17. // Copyright © 2019 StarSky_MacBook Pro. All rights reserved. // #include <iostream> #include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgproc.hpp" using namespace cv; using namespace std; CvSeq * cvMatGetAreaMaxContour(CvSeq *contour) {//在给定的contour中找到面积最大的一个轮廓,并返回指向该轮廓的指针 double contour_area_temp=0,contour_area_max=0; CvSeq * area_max_contour = 0 ;//指向面积最大的轮廓 CvSeq* c=0; //printf( "Total Contours Detected: %d/n", Nc ); for(c=contour; c!=NULL; c=c->h_next ) {//寻找面积最大的轮廓,即循环结束时的area_max_contour contour_area_temp = fabs(cvContourArea( c, CV_WHOLE_SEQ )); //获取当前轮廓面积 if( contour_area_temp > contour_area_max ) { contour_area_max = contour_area_temp; //找到面积最大的轮廓 area_max_contour = c;//记录面积最大的轮廓 } } return area_max_contour; } vector<vector<Point>> MatGetAreaMaxContour(vector<vector<Point>> contour) {//在给定的contour中找到面积最大的一个轮廓,并返回指向该轮廓的指针 double contour_area_temp=0,contour_area_max=0; vector<vector<Point>> area_max_contour ;//指向面积最大的轮廓 for(int i = 0 ; i < contour.size();i++) {//寻找面积最大的轮廓,即循环结束时的area_max_contour contour_area_temp = fabs(contourArea(contour[i])); //获取当前轮廓面积 if( contour_area_temp > 1500 && contour_area_temp > contour_area_max ) { contour_area_max = contour_area_temp; //找到面积最大的轮廓 //Max_c = contour[i]; area_max_contour.push_back(contour[i]);//记录面积最大的轮廓 } } return area_max_contour; } int main( int argc, char** argv ) { VideoCapture cap(0); //capture the video from web cam if ( !cap.isOpened() ) // if not success, exit program { cout << "Cannot open the web cam" << endl; return -1; } namedWindow("Control", CV_WINDOW_AUTOSIZE); //create a window called "Control" //Blue int iLowH = 100; int iHighH = 140; // int iLowH = 160; // int iHighH = 179; int iLowS = 90; int iHighS = 255; int iLowV = 1; int iHighV = 255; //Create trackbars in "Control" window cvCreateTrackbar("LowH", "Control", &iLowH, 179); //Hue (0 - 179) cvCreateTrackbar("HighH", "Control", &iHighH, 179); cvCreateTrackbar("LowS", "Control", &iLowS, 255); //Saturation (0 - 255) cvCreateTrackbar("HighS", "Control", &iHighS, 255); cvCreateTrackbar("LowV", "Control", &iLowV, 255); //Value (0 - 255) cvCreateTrackbar("HighV", "Control", &iHighV, 255); CvMemStorage* mem_storage = cvCreateMemStorage(0); CvSeq *first_contour = NULL; //定义变量 vector<vector<Point>> contours; vector<Vec4i> hierarchy; vector<vector<Point>> fakeContours; while (true) { Mat imgOriginal; bool bSuccess = cap.read(imgOriginal); // read a new frame from video if (!bSuccess) //if not success, break loop { cout << "Cannot read a frame from video stream" << endl; break; } Mat imgHSV; vector<Mat> hsvSplit; cvtColor(imgOriginal, imgHSV, COLOR_BGR2HSV); //Convert the captured frame from BGR to HSV //因为我们读取的是彩色图,直方图均衡化需要在HSV空间做 split(imgHSV, hsvSplit); equalizeHist(hsvSplit[2],hsvSplit[2]); merge(hsvSplit,imgHSV); Mat imgThresholded; inRange(imgHSV, Scalar(iLowH, iLowS, iLowV), Scalar(iHighH, iHighS, iHighV), imgThresholded); //Threshold the image //开操作 (去除一些噪点) Mat element = getStructuringElement(MORPH_RECT, Size(5, 5)); morphologyEx(imgThresholded, imgThresholded, MORPH_OPEN, element); //闭操作 (连接一些连通域) morphologyEx(imgThresholded, imgThresholded, MORPH_CLOSE, element); //cvFindContours(imgThresholded, mem_storage, &first_contour); /*这一段需要转换Mat cvMat IPImage IplImage imgTmp = imgThresholded; IplImage *temp = cvCloneImage(&imgTmp); if (!imgThresholded.empty()) { cvFindContours(temp, mem_storage, &first_contour); CvRect rect; if (first_contour != NULL) { first_contour = GetAreaMaxContour(first_contour); rect = cvBoundingRect(GetAreaMaxContour(first_contour),0); //cvRectangle(temp, cvPoint(rect.x, rect.y), cvPoint(rect.x + rect.width, rect.y + rect.height),CV_RGB(255,255, 255), 1, 8, 0); Mat ROI = imgThresholded(rect); imshow("ROI_WIN",ROI); } } */ if (!imgThresholded.empty()) { findContours(imgThresholded, contours, hierarchy, RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); CvRect rect; fakeContours = MatGetAreaMaxContour(contours); if (!contours.empty() && !fakeContours.empty()) { cout<<"识别到的数量:"<<fakeContours.size()<<endl; for (int i = 0; i < fakeContours.size(); i++) { rect = boundingRect(MatGetAreaMaxContour(contours)[i]); Mat ROI = imgThresholded(rect); string imageName = "Card" + to_string(i); imshow(imageName,ROI); } } } contours.clear(); //imshow("Thresholded Image", imgThresholded); //show the thresholded image //imshow("Original", imgOriginal); //show the original image char key = (char) waitKey(50); if(key == 27) break; } return 0; }
导入的OpenCV不多说,有一个打开摄像头的问题提示 .plist没有你的信息。新建一个文件之后添加Target目录
![]()
关于 HSV色彩详情请看:https://blog.csdn.net/qq78442761/article/details/82805610
接下来是iOS部分,比较简单。 oc 和 c++混写:
// // ViewController.m // FindABC // // Created by StarSky_MacBook Pro on 2019/7/20. // Copyright © 2019 StarSky_MacBook Pro. All rights reserved. // #import "ViewController.h" #import <opencv2/opencv.hpp> #import <opencv2/imgproc/types_c.h> #import <opencv2/videoio/cap_ios.h> #import <opencv2/imgcodecs/ios.h> using namespace cv; using namespace std; @interface ViewController ()<CvVideoCameraDelegate> { Mat cvImage; CascadeClassifier faceDetector; } @property (weak, nonatomic) IBOutlet UIImageView *testView; @property (strong, nonatomic) UIImageView *videoCameraView; @property (nonatomic,strong) CvVideoCamera* videoCamera; @end //Blue int iLowH = 100; int iHighH = 140; // int iLowH = 160; // int iHighH = 179; int iLowS = 90; int iHighS = 255; int iLowV = 1; int iHighV = 255; //定义变量 vector<vector<cv::Point>> contours; vector<Vec4i> hierarchy; vector<vector<cv::Point>> fakeContours; @implementation ViewController - (void)viewDidLoad { [super viewDidLoad]; // Do any additional setup after loading the view. //self.videoCameraView = [[UIImageView alloc]initWithFrame:self.view.frame]; self.videoCamera = [[CvVideoCamera alloc]initWithParentView:self.videoCameraView]; self.videoCamera.delegate = self; self.videoCamera.defaultAVCaptureDevicePosition =AVCaptureDevicePositionFront; self.videoCamera.defaultAVCaptureSessionPreset =AVCaptureSessionPresetHigh; self.videoCamera.defaultAVCaptureVideoOrientation = AVCaptureVideoOrientationPortrait; self.videoCamera.defaultFPS = 30; //[self.view addSubview:self.videoCameraView]; [self.videoCamera start]; } - (void)processImage:(cv::Mat &)image { // 将图像转换为灰度显示 //cvtColor(image, image, COLOR_RGBA2RGB); Mat imgHSV; vector<Mat> hsvSplit; cvtColor(image, imgHSV, COLOR_BGR2HSV); //Convert the captured frame from BGR to HSV //因为我们读取的是彩色图,直方图均衡化需要在HSV空间做 split(imgHSV, hsvSplit); equalizeHist(hsvSplit[2],hsvSplit[2]); merge(hsvSplit,imgHSV); Mat imgThresholded; inRange(imgHSV, Scalar(iLowH, iLowS, iLowV), Scalar(iHighH, iHighS, iHighV), imgThresholded); //Threshold the image //开操作 (去除一些噪点) Mat element = getStructuringElement(MORPH_RECT, cv::Size(5, 5)); morphologyEx(imgThresholded, imgThresholded, MORPH_OPEN, element); //闭操作 (连接一些连通域) morphologyEx(imgThresholded, imgThresholded, MORPH_CLOSE, element); //cvFindContours(imgThresholded, mem_storage, &first_contour); /*这一段需要转换Mat cvMat IPImage IplImage imgTmp = imgThresholded; IplImage *temp = cvCloneImage(&imgTmp); if (!imgThresholded.empty()) { cvFindContours(temp, mem_storage, &first_contour); CvRect rect; if (first_contour != NULL) { first_contour = GetAreaMaxContour(first_contour); rect = cvBoundingRect(GetAreaMaxContour(first_contour),0); //cvRectangle(temp, cvPoint(rect.x, rect.y), cvPoint(rect.x + rect.width, rect.y + rect.height),CV_RGB(255,255, 255), 1, 8, 0); Mat ROI = imgThresholded(rect); imshow("ROI_WIN",ROI); } } */ if (!imgThresholded.empty()) { findContours(imgThresholded, contours, hierarchy, RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); CvRect rect; fakeContours = MatGetAreaMaxContour(contours); if (!contours.empty() && !fakeContours.empty()) { cout<<"识别到的数量:"<<fakeContours.size()<<endl; for (int i = 0; i < fakeContours.size(); i++) { rect = boundingRect(MatGetAreaMaxContour(contours)[i]); Mat ROI = imgThresholded(rect); dispatch_async(dispatch_get_main_queue(), ^{ self.testView.image = MatToUIImage(ROI); }); } } } contours.clear(); } vector<vector<cv::Point>> MatGetAreaMaxContour(vector<vector<cv::Point>> contour) {//在给定的contour中找到面积最大的一个轮廓,并返回指向该轮廓的指针 double contour_area_temp=0,contour_area_max=0; vector<vector<cv::Point>> area_max_contour ;//指向面积最大的轮廓 for(int i = 0 ; i < contour.size();i++) {//寻找面积最大的轮廓,即循环结束时的area_max_contour contour_area_temp = fabs(contourArea(contour[i])); //获取当前轮廓面积 if( contour_area_temp > 1500 && contour_area_temp > contour_area_max ) { contour_area_max = contour_area_temp; //找到面积最大的轮廓 //Max_c = contour[i]; area_max_contour.push_back(contour[i]);//记录面积最大的轮廓 } } return area_max_contour; } @end
注意: 首先是opencv 的头文件路径可能出现问题,仔细找找就能弄到正确的路径;
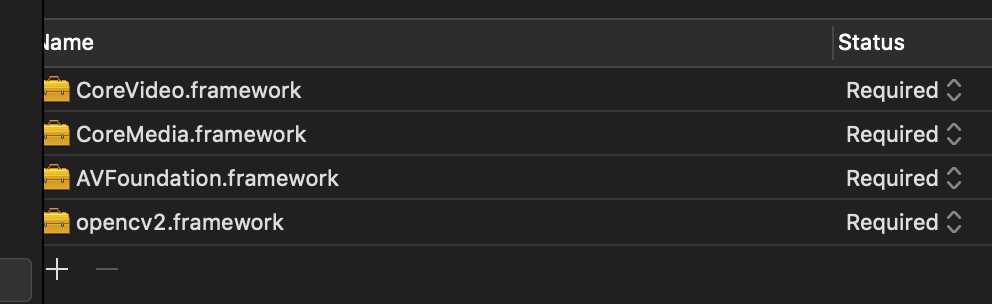
导入我们能用到的所有framework
然后将代码一直过来就行了。注意Point 里边我们需要使用CV命名空间。
标签:holo 记录 img cascade tps class pat target struct
原文地址:https://www.cnblogs.com/JMarshall/p/11219821.html