标签:有一个 基础 方向 width blank track thml als ref
1.1 特征点与角点
特征点是计算机视觉算法的基础,使用特征点来代表图像的内容。
角点是一类重要的点特征,图像分析的角度来定义:
有以下特点:
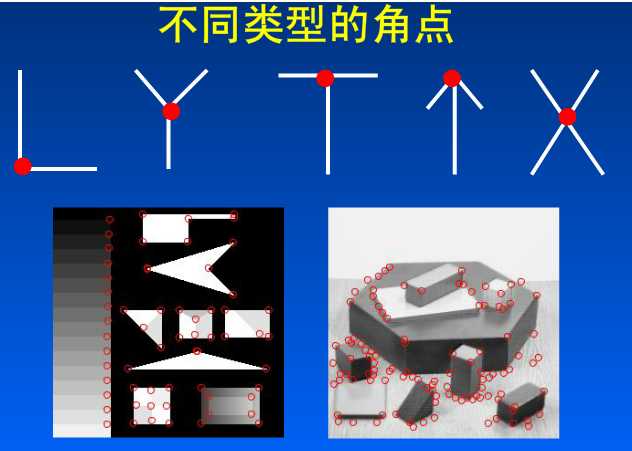
不同类型的角点:
1.2 典型的角点检测算法
一种需要对图像边缘进行编码,这在很大程度上依赖于图像的分割与边缘提取,具有相当大的难度和计算量,且一旦待检测目标局部发生变化,很可能导致操作的失败。
另一种基于图像灰度的方法通过计算点的曲率及梯度来检测角点,避免了第一类方法存在的缺陷,此类方法主要有Moravec算子、Forstner算子、Harris算子、SUSAN算子等。
比较著名的角点检测方法还有jianbo Shi和Carlo Tomasi提出的Shi-Tomasi算法,这个算法开始主要是为了解决跟踪问题,用来衡量两幅图像的相似度,我们也可以把它看为Harris算法的改进。OpenCV中已经对它进行了实现,接口函数名为GoodFeaturesToTrack()。
另外还有一个著名的角点检测算子即SUSAN算子,SUSAN是Smallest Univalue Segment Assimilating Nucleus(最小核值相似区)的缩写。SUSAN使用一个圆形模板和一个圆的中心点,通过圆中心点像素与模板圆内其他像素值的比较,统计出与圆中心像素近似的像元数量,当这样的像元数量小于某一个阈值时,就被认为是要检测的角点。我觉得可以把SUSAN算子看为Harris算法的一个简化。这个算法原理非常简单,算法效率也高,所以在OpenCV中,它的接口函数名称为:FAST() 。
2、Harris角点检测
2.1 原理
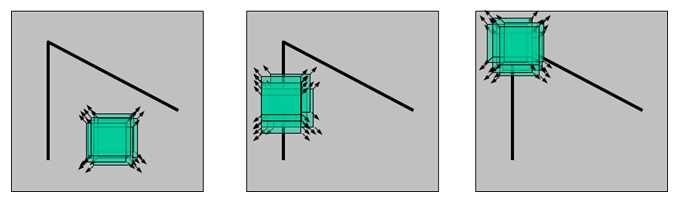
人眼对角点的识别通常是在一个局部的小区域或小窗口完成的。如果在各个方向上移动这个特征的小窗口,窗口内区域的灰度发生了较大的变化,那么就认为在窗口内遇到了角点。
如果这个特定的窗口在图像各个方向上移动时,窗口内图像的灰度没有发生变化,那么窗口内就不存在角点;
如果窗口在某一个方向移动时,窗口内图像的灰度发生了较大的变化,而在另一些方向上没有发生变化,那么,窗口内的图像可能就是一条直线的线段。
对于图像I(x,y),当在点(x,y)处平移(Δx,Δy)后的自相似性,可以通过自相关函数给出:

标签:有一个 基础 方向 width blank track thml als ref
原文地址:https://www.cnblogs.com/pacino12134/p/11380040.html