标签:缺点 阻塞 它的 发送 基于 传输 stand 调整 缓存
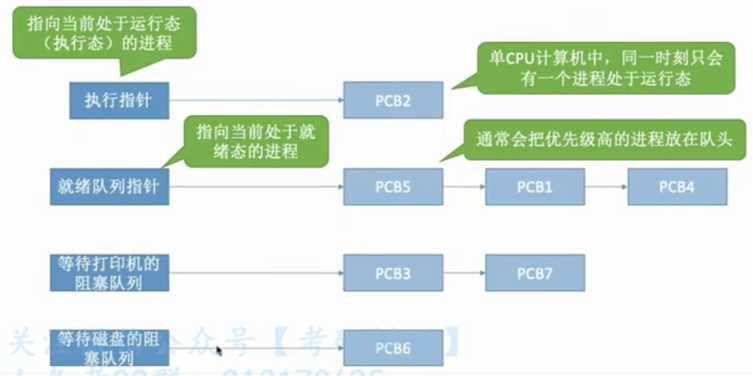
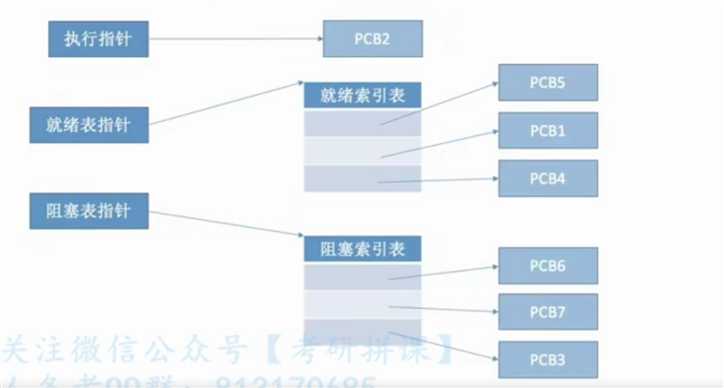
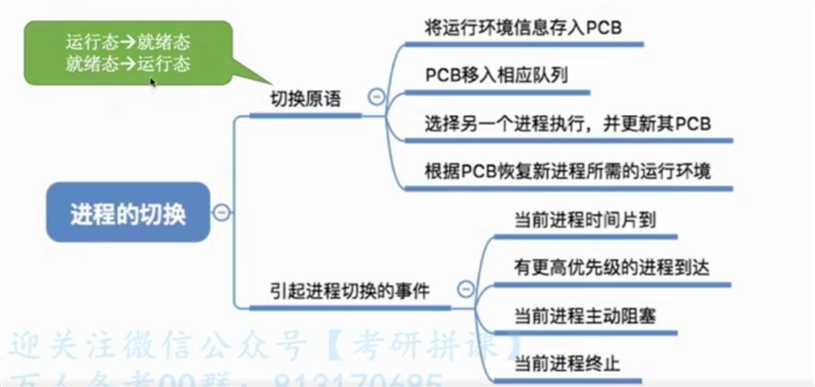
为了对同一个状态下各个进程进行统一的管理,操作系统会将各个进程的PCB组织起来
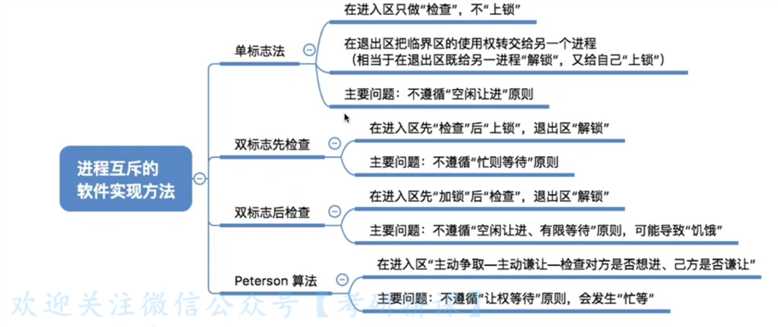
但没有实现让权等待
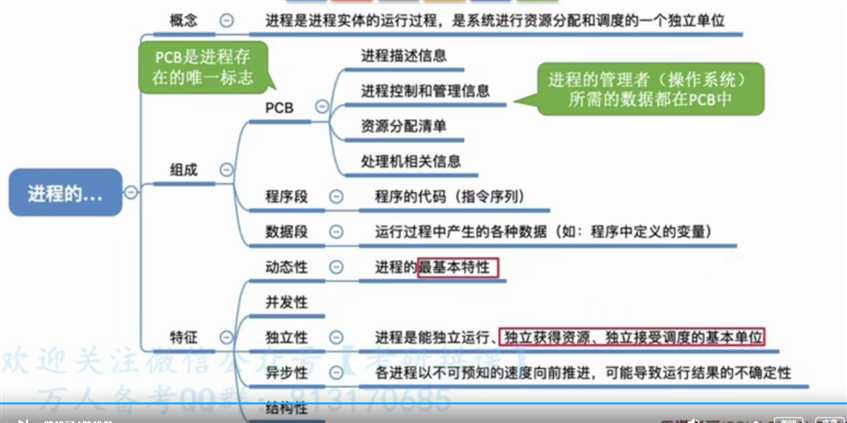
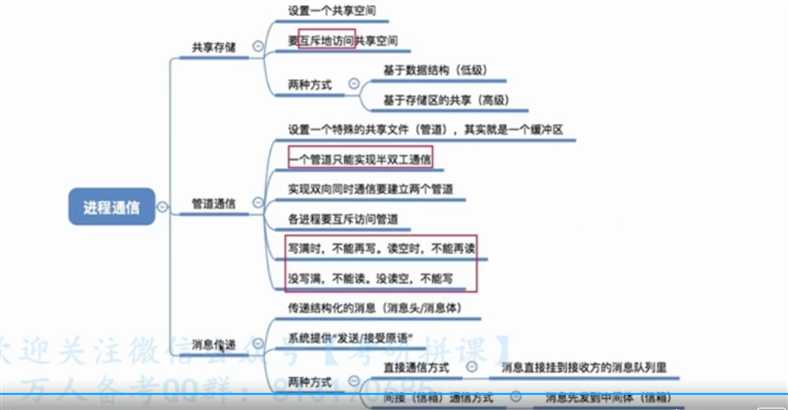
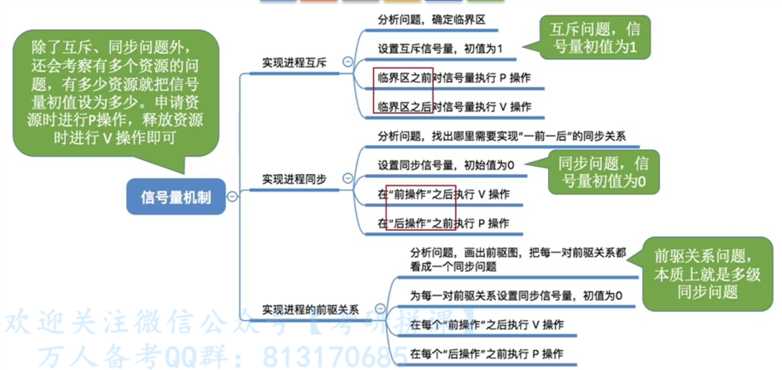
进程管理
原文地址:https://www.cnblogs.com/li-code/p/11391858.html