标签:哈希算法 自定义 推荐 改进 学习资料 位置 次方 负载 空间
更多内容,欢迎关注微信公众号:全菜工程师小辉。公众号回复关键词,领取免费学习资料。
一致性hash算法,是麻省理工学院1997年提出的一种算法,目前主要应用于分布式缓存当中。
一致性hash算法可以有效地解决分布式存储结构下动态增加和删除节点所带来的问题。
在Memcached、Key-Value Store、Bittorrent DHT、LVS中都采用了一致性hash算法,可以说一致性hash算法是分布式系统负载均衡的首选算法。
常用的算法是对hash结果取余数 (hash() mod N):对机器编号从0到N-1,按照自定义的hash算法,对每个请求的hash值按N取模,得到余数i,然后将请求分发到编号为i的机器。但这样的算法方法存在致命问题,如果某一台机器宕机,那么应该落在该机器的请求就无法得到正确的处理,这时需要将宕掉的服务器使用算法去除,此时候会有(N-1)/N的服务器的缓存数据需要重新进行计算;如果新增一台机器,会有N /(N+1)的服务器的缓存数据需要进行重新计算。对于系统而言,这通常是不可接受的颠簸(因为这意味着大量缓存的失效或者数据需要转移)。
传统求余做负载均衡算法,缓存节点数由3个变成4个,缓存不命中率为75%。计算方法:穷举hash值为1-12的12个数字分别对3和4取模,然后比较发现只有前3个缓存节点对应结果和之前相同,所以有75%的节点缓存会失效,可能会引起缓存雪崩。
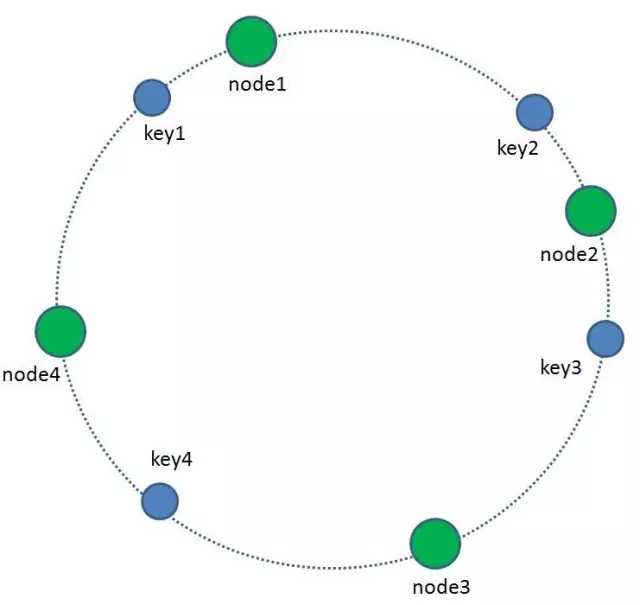
每一个缓存key都可以通过Hash算法转化为一个32位的二进制数,也就对应着环形空间的某一个缓存区。我们把所有的缓存key映射到环形空间的不同位置。
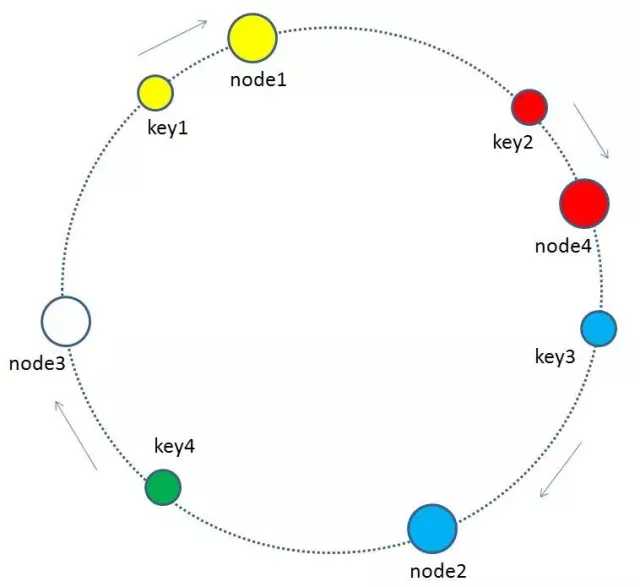
我们的每一个缓存节点也遵循同样的Hash算法,比如利用IP或者主机名做Hash,映射到环形空间当中,如下图
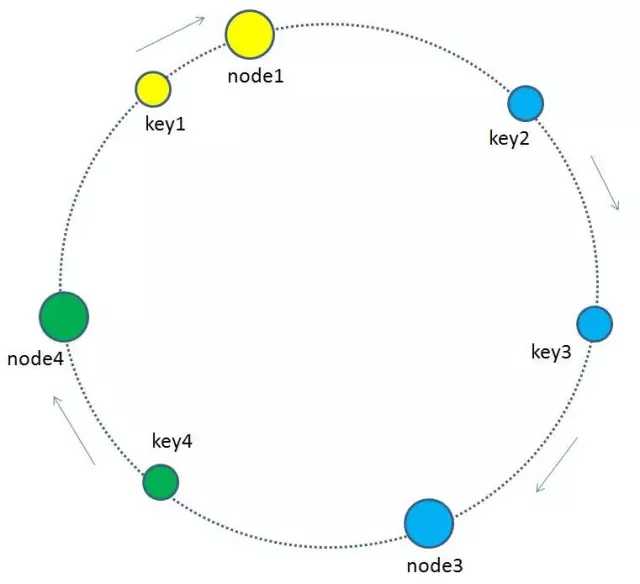
有哪些key会受到影响呢?图中加入了新节点node4,处于node1和node2之间,按照顺时针规则,从node1到node4之间的缓存不再归属于node2,而是归属于新节点node4。因此受影响的key只有key2。
最终把key2的缓存数据从node2迁移到node4,就形成了新的符合一致性哈希规则的缓存结构。
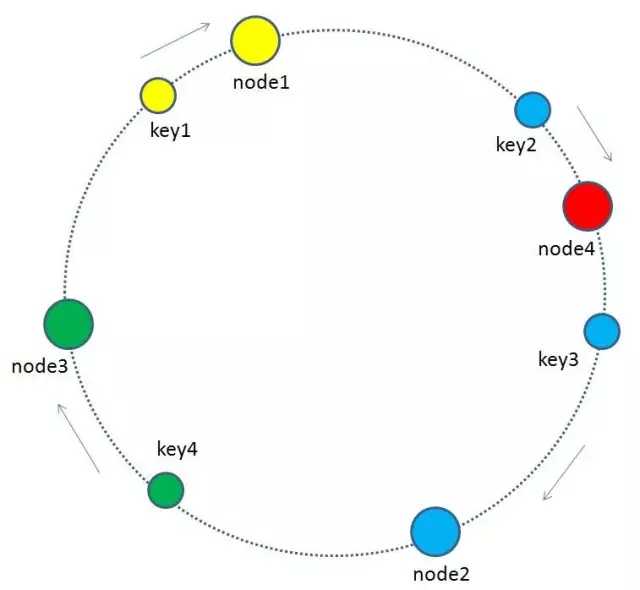
有哪些key会受到影响呢?图中删除了原节点node3,按照顺时针规则,原本node3所拥有的缓存数据就需要“托付”给node3的顺时针后继节点node1。因此受影响的key只有key4。
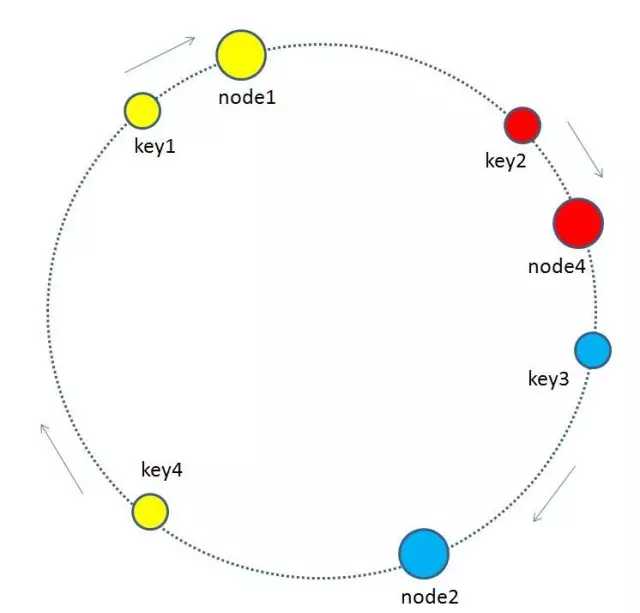
最终把key4的缓存数据从node3迁移到node1,就形成了新的符合一致性哈希规则的缓存结构。
说明:这里所说的迁移并不是直接的数据迁移,而是在查找时去找顺时针的后继节点,因缓存未命中而刷新缓存。
计算方法:假设节点hash散列均匀(由于hash是散列表,所以并不是很理想),采用一致性hash算法,缓存节点从3个增加到4个时,会有0-33%的缓存失效,此外新增节点不会环节所有原有节点的压力。
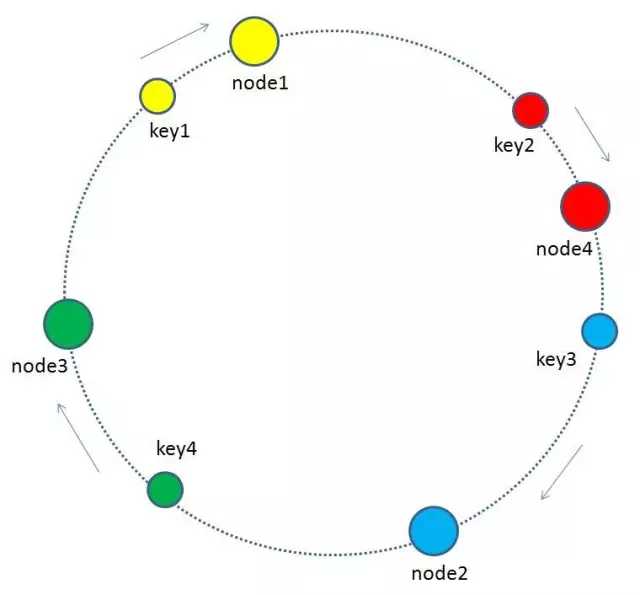
一致性hash算法的结果相比传统hash求余算法已经进步很多,但可不可以改进一下呢?或者如果出现分布不均匀的情况怎么办?比如下图这样,按顺时针规则,所有的key都归属于统一个节点。
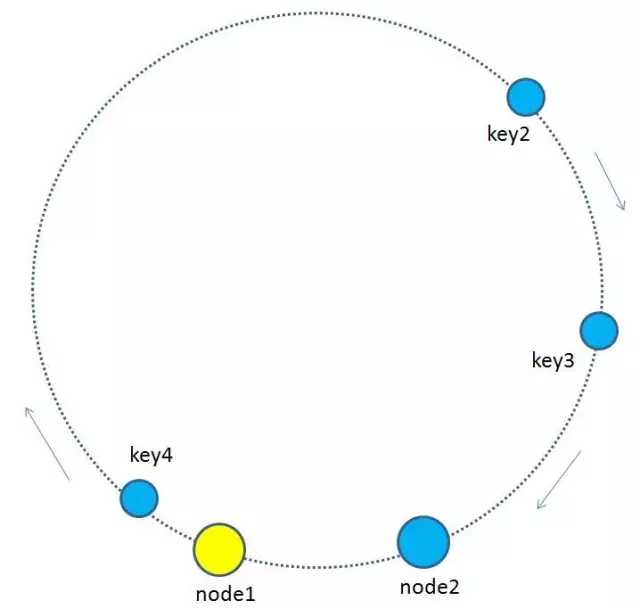
为了优化这种节点太少而产生的不均衡情况。一致性哈希算法引入了虚拟节点的概念。
所谓虚拟节点,就是基于原来的物理节点映射出N个子节点,最后把所有的子节点映射到环形空间上。
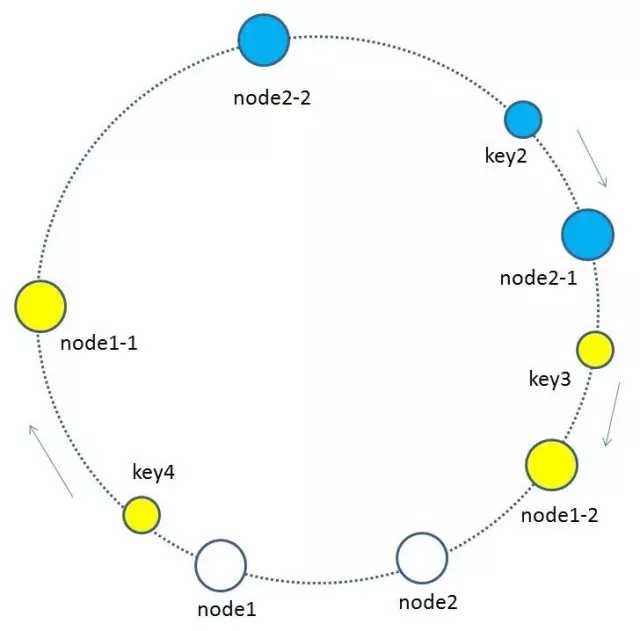
虚拟节点越多,分布越均匀。使用一致性hash算法+虚拟节点这种情况下,缓存节点从3个变成4个,缓存失效率为25%,而且每个节点都平均的承担了压力。
原理理解了,实现并不难,主要是一些细节:
另外,由于二叉树可能极度不平衡。所以采用红黑树是最稳妥的实现方法。Java中直接使用TreeMap即可。
更多内容,欢迎关注微信公众号:全菜工程师小辉。公众号回复关键词,领取免费学习资料。

标签:哈希算法 自定义 推荐 改进 学习资料 位置 次方 负载 空间
原文地址:https://www.cnblogs.com/mseddl/p/11427563.html