标签:三种方式 处理器 退出 相互 thread 请求 交互 equal 基本
线程是进程内相对独立的一个执行流,是进程内的一个执行单元,是操作系统中一个可调度的实体。
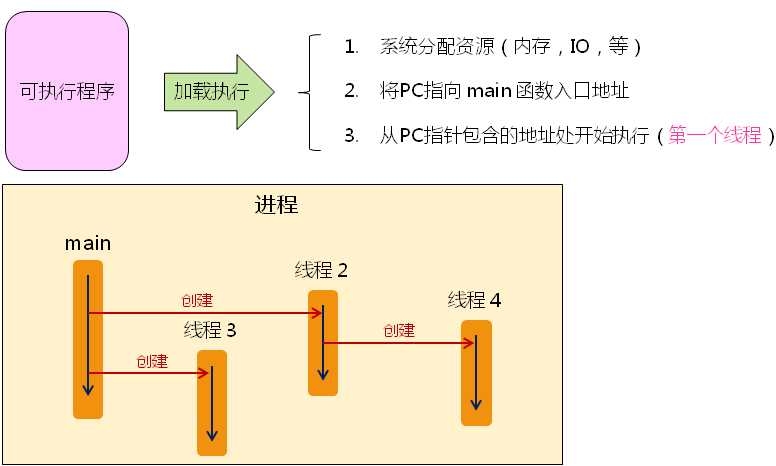
多线程,是指从软件或硬件层面上实现多个线程并发执行的技术。
实际上,对于单核处理器,即使软件编写为多线程模型,同一时间也只能执行一个线程,但这并不代表此时多线程就没有意义,因为处理器的数量不会影响程序结构,那么多线程编程模型在程序结构上到底有哪些好处呢?
pthread_t,可能实现为unsigned long或结构体,依系统而定pthread_self获得自身线程IDpthread_equal来比较两个线程的ID#include <pthread.h>
pthread_t pthread_self(); //返回调用线程的线程ID
int pthread_equal(pthread_t tid1, pthread_t tid2); //相等返回非0数值,否则返回0任意线程可以通过调用pthread_create创建新线程,start_routine为新线程的启动例程,创建成功后,新线程和调用线程谁先运行是不确定的。
//成功返回0,失败返回错误编号
int pthread_create(pthread_t *tid, const pthread_attr_t *attr, void *(*start_routine)(void *), void *arg); #include <pthread.h>
#include <stdio.h>
pthread_t tid;
void printf_tid(const char *s)
{
pid_t pid = getpid();
pthread_t tid = pthread_self();
printf("%s pid = %d, tid = %lu(0x%lx)\n", s, pid, tid, tid);
}
void *pthread_start(void *arg)
{
printf_tid("new thread: "); //新线程用pthread_self()获取自身ID,是因为新线程执行时pthread_create()可能还未返回,tid还未初始化完成
}
int main()
{
pthread_create(&tid, NULL, pthread_start, NULL);
sleep(1); //调用线程休眠1S,让新线程先执行
printf_tid("main thread: ");
return 0;
}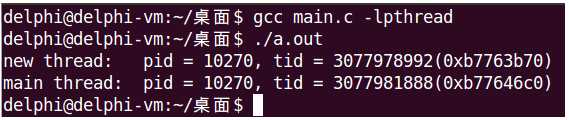
注意:使用pthread的代码在编译时需要指定链接-lpthread
在不影响整个进程的情况下,单个线程有三种终止方式:
return返回pthread_exit退出void pthread_exit(void *value_ptr);value_ptr是一个无类型指针,进程中的其他线程可以调用pthread_join访问到这个指针。
int pthread_join(pthread_t tid, void **value_ptr); //成功返回0,失败返回错误编号调用线程将一直阻塞,直到等待的线程以上述三种方式终止。
PTHREAD_CANCELED#include <pthread.h>
#include <stdio.h>
void *thread1_start(void *arg)
{
int ret = 0;
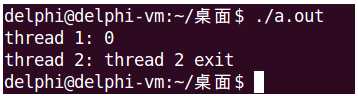
return ((void *)ret);
}
void *thread2_start(void *arg)
{
char *ret = "thread 2 exit";
pthread_exit(ret);
}
int main()
{
pthread_t tid1;
pthread_t tid2;
void *ret;
pthread_create(&tid1, NULL, thread1_start, NULL);
pthread_create(&tid2, NULL, thread2_start, NULL);
pthread_join(tid1, &ret);
printf("thread 1: %d\n", (int)ret);
pthread_join(tid2, &ret);
printf("thread 2: %s\n", (char *)ret);
return 0;
}
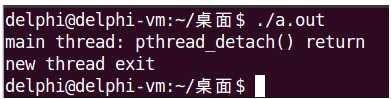
在默认情况下,线程的终止状态会一直保存到对该线程调用pthread_join;但是,如果线程已经被分离,其占用的系统资源会在线程终止时被立即回收。
有两种方式可以使线程分离:
pthread_detach,该函数不会使调用线程阻塞pthread_attr_t,以分离状态创建线程在线程被分离后,就不能再用pthread_join等待它的终止状态了,因为对分离状态的线程调用pthread_join会产生未定义行为。
int pthread_detach(pthread_t tid); //成功返回0,失败返回错误编号#include <pthread.h>
#include <stdio.h>
void *thread_start(void *arg)
{
sleep(2);
printf("new thread exit\n");
pthread_exit(NULL);
}
int main()
{
pthread_t tid;
pthread_create(&tid, NULL, thread_start, NULL);
pthread_detach(tid);
printf("main thread: pthread_detach() return\n");
sleep(5);
return 0;
}
/*4个函数的返回值:成功返回0,失败返回错误编号*/
int pthread_attr_init(pthread_attr_t *attr);
int pthread_attr_setdetachstate(pthread_attr_t *attr, int detachstate);
int pthread_attr_getdetachstate(const pthread_attr_t *attr, int *detachstate);
int pthread_attr_destroy(pthread_attr_t *attr);可以调用pthread_attr_setdetachstate来设置线程的可分离状态:
detachstate = PTHREAD_CREATE_DETACHED,以分离状态启动线程detachstate = PTHREAD_CREATE_JOINABLE,以正常状态启动线程#include <pthread.h>
#include <stdio.h>
void *thread_start(void *arg)
{
sleep(2);
printf("new thread exit\n");
pthread_exit(NULL);
}
int main()
{
pthread_t tid;
pthread_attr_t attr;
pthread_attr_init(&attr);
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
pthread_create(&tid, &attr, thread_start, NULL);
pthread_attr_destroy(&attr);
printf("main thread: pthread_attr_destroy() return\n");
sleep(5);
return 0;
}
在编写多线程代码时,经常面临线程安全退出问题,一般情况下,最好使用将标志位置位的方式;
在其他线程中将标志位置位,然后调用pthread_join等待线程退出,回收线程占用的资源。
void *thread_start(void *arg)
{
while (!quit)
{
//......
}
}
int main()
{
quit = 1;
pthread_join(tid, NULL);
}但是在某些应用中,线程可能正阻塞于某个函数(如pthread_cond_wait)无法被唤醒,即使设置了标志位也无法结束。
此时可以在其他线程中调用pthread_cancel请求取消线程,然后立即调用pthread_join等待线程退出。
int pthread_cancel(pthread_t tid); //成功返回0,失败返回错误编号tid为要取消的线程ID,需要注意的是,pthread_cancel并不等待线程终止,它仅仅是发出请求。
#include <pthread.h>
#include <stdio.h>
void *thread1_start(void *arg)
{
sleep(10);
pthread_exit(NULL);
}
void *thread2_start(void *arg)
{
sleep(10);
pthread_exit(NULL);
}
int main()
{
pthread_t tid1;
pthread_t tid2;
pthread_create(&tid1, NULL, thread1_start, NULL);
pthread_create(&tid2, NULL, thread2_start, NULL);
sleep(1);
pthread_cancel(tid1);
pthread_join(tid1, NULL);
printf("thread 1 exit\n");
sleep(1);
pthread_cancel(tid2);
pthread_join(tid2, NULL);
printf("thread 2 exit\n");
return 0;
}
线程取消有两个属性,分别是可取消状态和可取消类型,这两个属性不在pthread_attr_t结构中,但它们影响着线程在响应取消请求时的行为。
/*
* 可取消状态:PTHREAD_CANCEL_ENABLE(允许取消,默认属性),PTHREAD_CANCEL_DISABLE(不允许取消,但取消请求不会丢失,而是一直处于挂起状态)
* 可取消类型:PTHREAD_CANCEL_DEFERRED(延迟取消,到达取消点才取消,默认属性),PTHREAD_CANCEL_ASYNCHRONOUS(异步取消,可在任意时刻取消)
*/
int pthread_setcancelstate(int state, int *oldstate); //将线程可取消状态设为state,原有可取消状态通过oldstate返回,这两步是原子操作
int pthread_setcanceltype(int type, int *oldtype); //将线程可取消类型设为type,原有可取消类型通过oldtype返回默认情况下,线程的可取消类型为延迟取消,也就是说:被取消的线程在取消请求发出后还是继续运行,直到到达某个取消点。
取消点是线程检查它是否被取消的一个位置,根据《UNIX环境高级编程 第3版》P362-P363描述,POSIX.1定义的取消点和可选取消点如下。
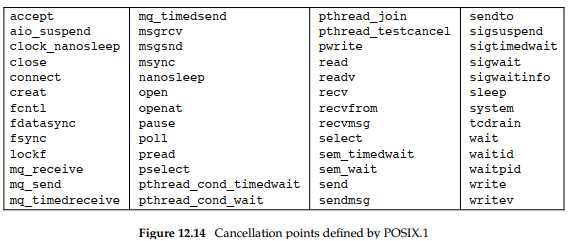
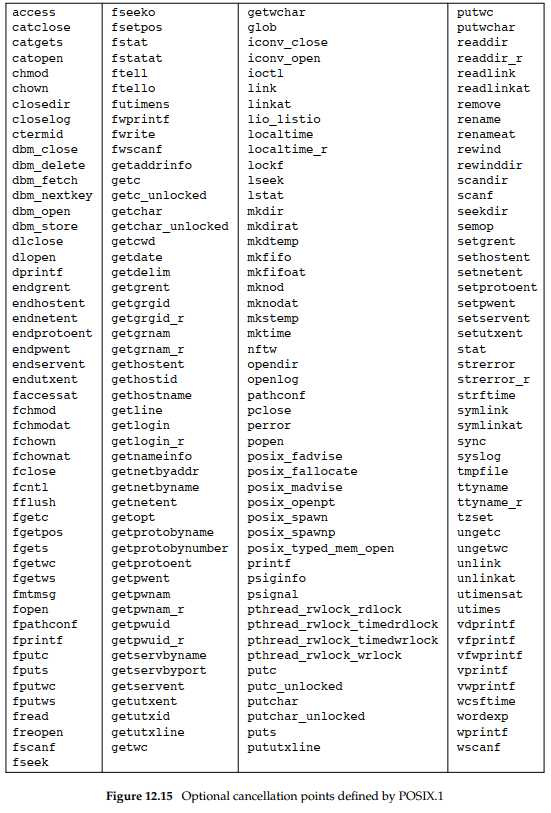
如果线程在很长一段时间内都不会调用前面两张图中的取消点函数,那么可以调用pthread_testcancel在线程中添加自己的取消点。
调用pthread_testcancel时,如果有某个取消请求处于挂起状态,且可取消状态为ENABLE,那么线程就会被取消。
void pthread_testcancel();当线程响应取消请求而终止时,主要面临的两大风险:
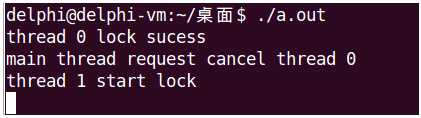
下面是一段由pthread_cancel引起的死锁范例代码。
#include <pthread.h>
#include <stdio.h>
static pthread_cond_t cond;
static pthread_mutex_t mutex;
void *thread0(void *arg)
{
pthread_mutex_lock(&mutex);
printf("thread 0 lock sucess\n");
pthread_cond_wait(&cond, &mutex); //主线程发出取消请求时,thread1阻塞于slepp(2),thread0阻塞于此取消点,导致thread0未解锁mutex就终止
printf("thread 0 pthread_cond_wait return\n");
pthread_mutex_unlock(&mutex);
pthread_exit(0);
}
void *thread1(void *arg)
{
sleep(2);
printf("thread 1 start lock\n");
pthread_mutex_lock(&mutex); //thread0终止约1S后,thread1执行到此,由于mutex已加锁,也没有其他地方能够对其解锁,从而导致死锁
printf("thread 1 lock sucess\n");
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
pthread_exit(0);
}
int main()
{
pthread_t tid[2];
pthread_cond_init(&cond, NULL);
pthread_mutex_init(&mutex, NULL);
pthread_create(&tid[0], NULL, thread0, NULL);
pthread_create(&tid[1], NULL, thread1, NULL);
sleep(1);
pthread_cancel(tid[0]);
printf("main thread request cancel thread 0\n");
pthread_join(tid[0], NULL);
pthread_join(tid[1], NULL);
pthread_cond_destroy(&cond);
pthread_mutex_destroy(&mutex);
return 0;
}
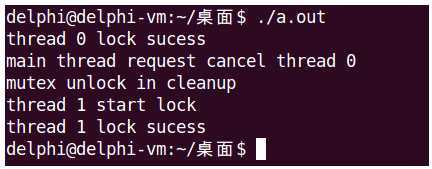
可以使用线程清理程序来解决线程取消的风险问题。线程可以安排它退出时需要调用的函数,这样的函数称为线程清理程序。
一个线程可以注册多个清理程序,处理程序记录在栈中,也就是说,它们的执行顺序和注册顺序是相反的。
void pthread_cleanup_push(void (*routine)(void *), void *arg);
void pthread_cleanup_pop(int execute);当线程执行以下动作时,清理程序是由pthread_cleanup_push函数调度的,调用时只有一个参数arg:
注意:如果线程以return方式终止,线程清理程序不会被调用。
不管发生上述哪种情况,pthread_cleanup_pop都将删除上次pthread_cleanup_push登记的线程清理程序。
这两个函数有一个限制,由于它们经常实现为宏,所以必须在与线程启动例程相同的作用域中以配对的方式使用,否则,可能会产生编译错误。
回到线程取消的风险问题上来,我们只需要在线程清理程序中解锁和释放资源,并在线程启动例程的第一步就注册清理程序,
这样,当线程因响应取消请求而终止时,线程清理程序就会得以执行。
#include <pthread.h>
#include <stdio.h>
static pthread_cond_t cond;
static pthread_mutex_t mutex;
void cleanup(void *arg)
{
pthread_mutex_unlock(&mutex);
printf("mutex unlock in cleanup\n");
}
void *thread0(void *arg)
{
pthread_cleanup_push(cleanup, NULL); //注册线程清理程序进行解锁
pthread_mutex_lock(&mutex);
printf("thread 0 lock sucess\n");
pthread_cond_wait(&cond, &mutex); //主线程发出取消请求时,thread1阻塞于slepp(2),thread0阻塞于此取消点
printf("thread 0 pthread_cond_wait return\n");
pthread_mutex_unlock(&mutex);
pthread_cleanup_pop(0);
pthread_exit(0);
}
void *thread1(void *arg)
{
sleep(2);
printf("thread 1 start lock\n");
pthread_mutex_lock(&mutex); //thread0终止约1S后,thread1执行到此
printf("thread 1 lock sucess\n");
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
pthread_exit(0);
}
int main()
{
pthread_t tid[2];
pthread_cond_init(&cond, NULL);
pthread_mutex_init(&mutex, NULL);
pthread_create(&tid[0], NULL, thread0, NULL);
pthread_create(&tid[1], NULL, thread1, NULL);
sleep(1);
pthread_cancel(tid[0]);
printf("main thread request cancel thread 0\n");
pthread_join(tid[0], NULL);
pthread_join(tid[1], NULL);
pthread_cond_destroy(&cond);
pthread_mutex_destroy(&mutex);
return 0;
}
最后,引用一篇由pthread_cancel引起死锁的博客https://blog.csdn.net/xsckernel/article/details/48052425,提取核心内容如下:
“通常的说法:某某函数是Cancellation Points,这种方法是容易令人混淆的。因为函数的执行是一个时间过程,而不是一个时间点。其实真正的Cancellation Points
只是在这些函数中Cancellation Type被修改为PHREAD_CANCEL_ASYNCHRONOUS和修改回PTHREAD_CANCEL_DEFERRED中间的一段时间。”
标签:三种方式 处理器 退出 相互 thread 请求 交互 equal 基本
原文地址:https://www.cnblogs.com/songhe364826110/p/11432412.html