标签:ima 迭代 阈值 idt hid src 排序算法 row 相加
本文参考博客:https://www.cnblogs.com/Imageshop/archive/2013/04/26/3045672.html
原生的中值滤波是基于排序算法的,这样的算法复杂度基本在O(r2)左右,当滤波半径较大时,排序算法就显得很慢。对此有多种改进算法,这里介绍经典
的Huang算法与O(1)算法,两者都是基于记忆性的算法,只是后者记性更强。
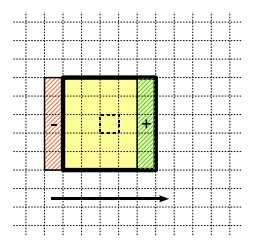
排序算法明显的一个不足之处就是无记忆性。当核向右移动一列后,只是核的最左和最右列数据发生了变化,中间不变的数据应当被存储起来,而排序算法
并没有做到这点。Huang算法的思想是建立一个核直方图,来统计核内的各灰度的像素数。当核向右移动时,就将新的一列所有数据加入到直方图中,同时将最
左列的旧数据从直方图中删除,如下图所示。这样做使得大部分数据能够被记忆,减少重复操作。当直方图更新完毕后,就可以通过从左到右累计像素来找到中值。
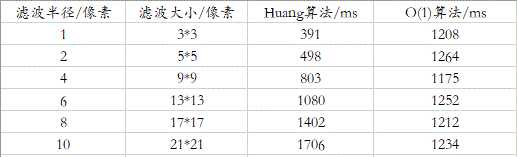
下面是算法具体实现步骤与代码:
1.每行开始都将直方图、像素计数、中值变量清零,将核覆盖的所有像素加到直方图中。
2.计算中值,sumcnt为小于中值灰度的像素数和。如果当前sumcnt大于等于阈值,则表明,实际中值比当前median小,则直方图向左减去像素数,同时median
也减小,直到sumcnt小于阈值,则此时median为中值(sumcnt加上中值像素数将大于或等于阈值);如果sumcnt加上median像素数仍小于阈值,表明,实
际中值比当前median大,则直方图向右累加像素数,同时median增加,直到sumcnt加上median像素数大于等于阈值,则此时median为中值(sumcnt小于阈值)。
3.核每向右移动一列,更新核直方图,比较每一个新加入的灰度值与median,小于则median加1,比较每一个减去的灰度值与median,小于则median减1。执行
一次步骤2后继续移动核,直到整幅图都被滤波完毕。

%中值滤波黄法 %输入:8位深度图像、滤波半径(3*3的半径为1,中值百分比) function grayimg=medianfilterhuang(grayimg,radius,percentage) [sizex,sizey]=size(grayimg); thres=int16(((2*radius+1)^2*percentage)); %扩展边界 extendimg=int16(horzcat(repmat(grayimg(:,1),1,radius),grayimg,repmat(grayimg(:,sizey),1,radius))); extendimg=int16(vertcat(repmat(extendimg(1,:),radius,1),extendimg,repmat(extendimg(sizex,:),radius,1))); for i=radius+1:sizex+radius %初始化直方图,每行第一个将所有像素加入直方图 histogram=int16(zeros(256,1)); sumcnt=int16(0); median=int16(0); for j=radius+1:sizey+radius %遍历卷积覆盖行 for k=i-radius:i+radius if (j>radius+1) %删去左列,加入新右列 histogram(extendimg(k,j-radius-1)+1)=histogram(extendimg(k,j-radius-1)+1)-1; histogram(extendimg(k,j+radius)+1)=histogram(extendimg(k,j+radius)+1)+1; %只关心中值灰度以左的像素数量 if (extendimg(k,j-radius-1)<median) sumcnt=sumcnt-1; end if (extendimg(k,j+radius)<median) sumcnt=sumcnt+1; end else %行首 for h=j-radius:j+radius histogram(extendimg(k,h)+1)=histogram(extendimg(k,h)+1)+1; end end end %sumcnt不将中值像素数累加进去 %旧中值偏大 while(sumcnt>=thres) median=median-1; sumcnt=sumcnt-histogram(median+1); end %旧中值偏小 while(sumcnt+histogram(median+1)<thres) sumcnt=sumcnt+histogram(median+1); median=median+1; end grayimg(i-radius,j-radius)=median; end end end
性能分析发现,Huang算法的大部分时间花在了更新核直方图上。并且由于它是O(r)的复杂度,因此当滤波半径变大后,更新直方图部分花费的时间也变多,而计算
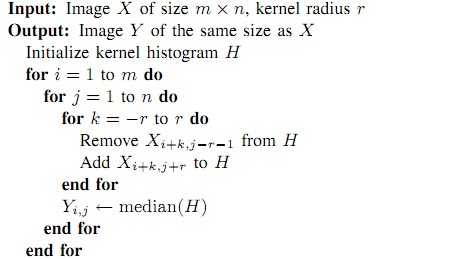
中值部分所花时间一直都是固定的,因为它的复杂度是O(1),与滤波半径无关。那么为了使直方图更新的复杂度能降到O(1),就要增强算法的记忆性。可以看到以相邻行
相同列为中心的核之间也存在重合,这跟之前以相邻列相同行为中心的核存在重合类似。于是,我们可以为每列都维护一个直方图,而核直方图可以由这些列直方图相加
得到,更新核的时候,最右边的一列直方图向下移动一行,就更新了列直方图,再减去最左边一列直方图,核就得到更新。这样每次更新直方图都只要移动一次列直方图,
而其余的都是直方图的加减操作,值得注意的是,这样的实现很完美得利用了可并行的矩阵加减来代替顺序执行的for迭代。因此,虽然更新过程看上去有许多加减操作,
实际上都是可快速并行执行的。
还有一点,由于并行化的矩阵加减,就不能用sumcnt来跟踪阈值变化了。如果直接迭代累加直方图,最坏的情况是要执行255加法。为了使中值计算更快,可以采用
两层直方图,高层用于保存高4位(直方图大小为16*1),低层保存全位(直方图大小为256*1)。每次先累加高层进行范围缩小,再从相应范围累加低层找到中值。只是
这样就牺牲了内存空间。
下面是算法具体实现步骤与代码:
1.扩展图像边界,上边界扩展r+1行,其他边界扩展r行;为每列生成两层直方图,并为其初始化,添加各列的前2*r+1个像素;生成一个低层链接高层的索引矩阵。
2.每行开始清零核直方图,更新核覆盖的各列直方图(向下移动一行),将各列加到核直方图中。
3.寻找中值,初始化sumcnt=0,这里它表示小于等于中值灰度的像素和,从左到右迭代高层直方图,直到sumcnt大于等于阈值;再从高层确定的范围内从右到左迭代
低层直方图,直到sumcnt(减去了迭代灰度的像素数)小于阈值,则当前迭代值为中值。
4.核每向右移动,更新列直方图与核直方图,执行一次步骤3,然后继续移动核,直到完成整个图的滤波。
function grayimg=medianfilterdp(grayimg,radius,percentage) [sizex,sizey]=size(grayimg); thres=int16(((2*radius+1)^2*percentage)); %扩展边界 extendimg=int16(horzcat(repmat(grayimg(:,1),1,radius),grayimg,repmat(grayimg(:,sizey),1,radius))); extendimg=int16(vertcat(repmat(extendimg(1,:),radius+1,1),extendimg,repmat(extendimg(sizex,:),radius,1))); %为每一列维护一个全位直方图和一个高位直方图 histogram_cols_low=int16(zeros(sizey+2*radius,256)); histogram_cols_high=int16(zeros(sizey+2*radius,16)); %中值计算所用的一个全位直方图和一个高位直方图 histogram_low=int16(zeros(1,256)); histogram_high=int16(zeros(1,16)); %全位转高位的加速索引 grayrange=int16(zeros(1,256)); for i=1:16 grayrange(:,(i-1)*16+1:i*16)=i; end %初始化各列直方图 for row=1:2*radius+1 for col=1:sizey+2*radius histogram_cols_low(col,extendimg(row,col)+1)=histogram_cols_low(col,extendimg(row,col)+1)+1; histogram_cols_high(col,grayrange(extendimg(row,col)+1))=histogram_cols_high(col,grayrange(extendimg(row,col)+1))+1; end end for row=int16(radius+2:sizex+radius+1) for col=int16(radius+1:sizey+radius) if(col>radius+1) %更新右边新列,删除左边旧列 histogram_cols_low(col+radius,extendimg(row+radius,col+radius)+1)=histogram_cols_low(col+radius,extendimg(row+radius,col+radius)+1)+1; histogram_cols_low(col+radius,extendimg(row-radius-1,col+radius)+1)=histogram_cols_low(col+radius,extendimg(row-radius-1,col+radius)+1)-1; histogram_cols_high(col+radius,grayrange(extendimg(row+radius,col+radius)+1))=histogram_cols_high(col+radius,grayrange(extendimg(row+radius,col+radius)+1))+1; histogram_cols_high(col+radius,grayrange(extendimg(row-radius-1,col+radius)+1))=histogram_cols_high(col+radius,grayrange(extendimg(row-radius-1,col+radius)+1))-1; histogram_low=histogram_low+histogram_cols_low(col+radius,:)-histogram_cols_low(col-radius-1,:); histogram_high=histogram_high+histogram_cols_high(col+radius,:)-histogram_cols_high(col-radius-1,:); else histogram_low(:,:)=0; histogram_high(:,:)=0; %行首手动初始化各列 for index=1:2*radius+1 histogram_cols_low(index,extendimg(row+radius,index)+1)=histogram_cols_low(index,extendimg(row+radius,index)+1)+1; histogram_cols_low(index,extendimg(row-radius-1,index)+1)=histogram_cols_low(index,extendimg(row-radius-1,index)+1)-1; histogram_cols_high(index,grayrange(extendimg(row+radius,index)+1))=histogram_cols_high(index,grayrange(extendimg(row+radius,index)+1))+1; histogram_cols_high(index,grayrange(extendimg(row-radius-1,index)+1))=histogram_cols_high(index,grayrange(extendimg(row-radius-1,index)+1))-1; histogram_low=histogram_low+histogram_cols_low(index,:); histogram_high=histogram_high+histogram_cols_high(index,:); end end %中值及之前的所有像素数 sumcnt=int16(0); for gray_high=1:16 sumcnt=sumcnt+histogram_high(gray_high); if (sumcnt>=thres) break; end end for gray_low=gray_high*16:-1:(gray_high-1)*16+1 sumcnt=sumcnt-histogram_low(gray_low); if (sumcnt<thres) break; end end grayimg(row-radius-1,col-radius)=gray_low-1; end end end
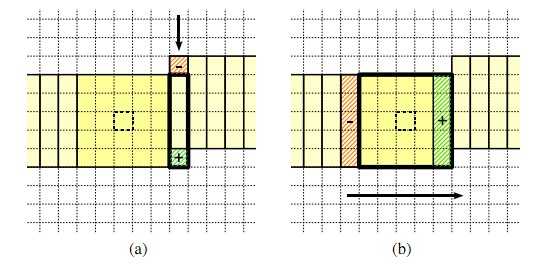
下面是两种算法的性能对比,可以发现,在滤波半径较小的时候,用Huang算法更好;当滤波半径>=8时,用后一种算法更快。实际中我们一般用不到大半径,但这两种
算法的思想很不错,尤其是第二种的空间换时间,我们可能可以发现横向存在重复性,但很容易忽略了纵向上的重复性。
标签:ima 迭代 阈值 idt hid src 排序算法 row 相加
原文地址:https://www.cnblogs.com/kensporger/p/11660984.html
