标签:watch 位置 lin hang 反向 种类 archive 假设 深度学习
前言
AutoEncoder是深度学习的另外一个重要内容,并且非常有意思,神经网络通过大量数据集,进行end-to-end的训练,不断提高其准确率,而AutoEncoder通过设计encode和decode过程使输入和输出越来越接近,是一种无监督学习过程。
AutoEncoder
Introduction
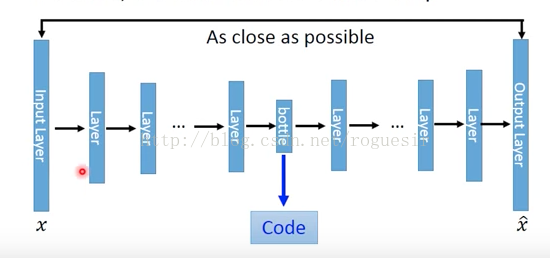
AutoEncoder包括两个过程:encode和decode,输入图片通过encode进行处理,得到code,再经过decode处理得到输出,有趣的是,我们控制encode的输出维数,就相当于强迫encode过程以低维参数学习高维特征,这导致的结果和PCA类似。
AutoEncoder的目的是使下图中的输入x和输出x_head越相似越好,这就需要在每次输出之后,进行误差反向传播,不断优化。
高维数据对于我们的感官体验总是不友好,如果我们将输入降低至二维,放在二维平面中就会更加直观,下图是MNIST数据集做AutoEncoder:
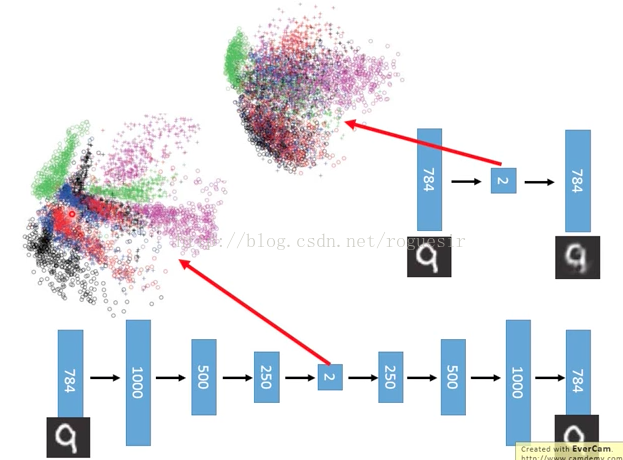
上面是PCA的结果,下面是AutoEncoder的结果,在二维中结果很清晰。
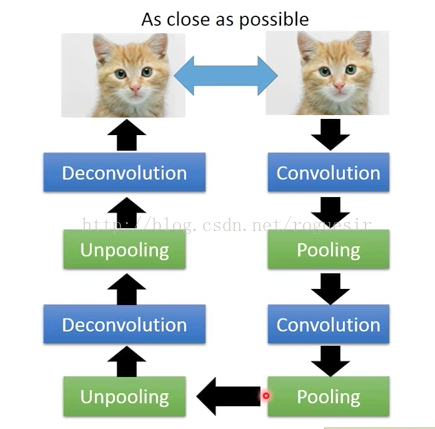
encode和decode两个过程可以理解成互为反函数,在encode过程不断降维,在decode过程提高维度。当AutoEncoder过程中用卷积操作提取特征,相当于encode过程为一个深度卷积神经网络,好多层的卷积池化,那么decode过程就需要进行反卷积和反池化,那么,反卷积和反池化如何定义呢?
Unpooling
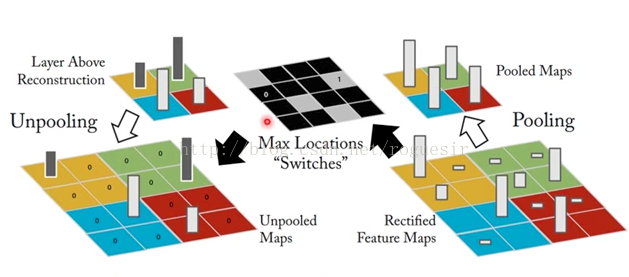
池化过程实际上就是降维过程,假设图片大小为32x32,池化大小为2x2,就相当于将图片中相邻的2x2个像素点替换为四个点中最大数值(max-pooling),池化处理之后得到的图片大小为16x16,Unpooling过程则需要将16x16的图片变为32x32,其实在池化过程中,会标记2x2像素点中最大值的位置,在Unpooling过程将最大值还原,其他位置填0。
以上并不是Unpooling的唯一做法,在Keras中,不会记住最大值的位置,而是将所有像素均以最大值填充。
Deconvolution
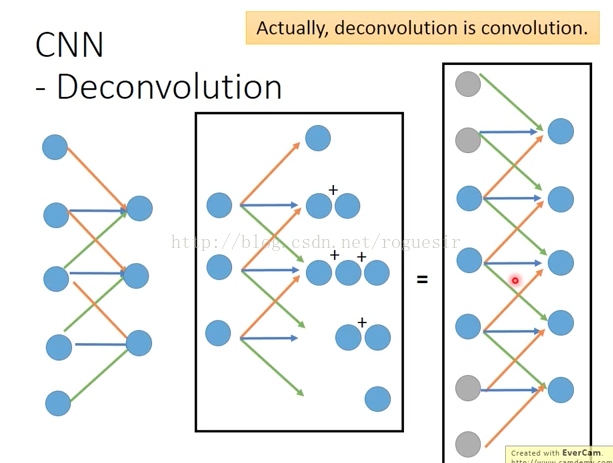
卷积过程是一个矩阵在另一个矩阵上面做滑动运算,反卷积也是一样,实际上,反卷积就是卷积,看下面的图,我们熟悉的是左面的卷积过程,假设有5个像素点,卷积核为3,步长为1,卷积之后生成3个feature,我们想象中的反卷积应该是中间所示的情形,由3个输入生成5个输出,如果我们将反卷积中的输入做2的padding,这样原本3个输入变成7个输入,再做卷积,生成5个输出,对比左右两侧的图,是完全相反的,所以,我们加上padding,使反卷积变成了卷积运算。
De-noising AutoEncoder
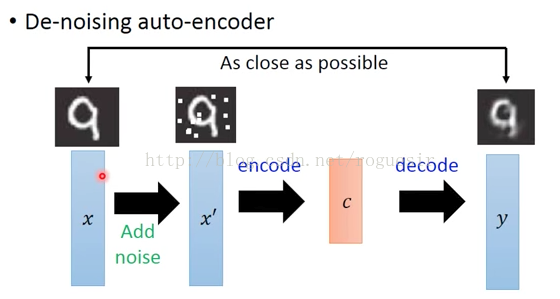
对于AutoEncoder,每一次的训练都是自身的对比,这回造成输出和输入越来越类似,而对同种类的其他图片表现不敏感,于是,De-noising AutoEncoder派上了用场,如下图所示,在输入之前,先将图片加入随机噪声,这样每次的输入都会略有差异,然后将带有噪声的图片进行AutoEncoder,将输出的y与加噪声之前的图片进行比较,这样训练出来的y就具有抗噪声的能力,在以图搜图的场景下也就提高了泛化能力。
算法推导
参考资料
李航《统计学习方法》
AutoEncoder详解
标签:watch 位置 lin hang 反向 种类 archive 假设 深度学习
原文地址:https://www.cnblogs.com/klausage/p/11723348.html