标签:process recover important sel bootanim a* time top prope
Init属性服务
系统属性服务
属性梳理
来源和读取时机
ro.kernel.* 代表有qemu内核参数才会设置(在虚拟机中)
ro.boot.* 1.内核设备树相关的设备属性,从 /proc/cmdline 的androidboot.* 中来
2.内部变量export_kernel_boot_props()中有个默认值表,当内核所给出的属性如ro.boot.serialno没有值时,那么ro.serialno的默认值将是表中给出的
ctl.* 一般用于IPC,如ctl.bootanim 开机动画,这种不会在读取/property_contexts 后,加入到 contexts集合中(控制消息不持久化记录,通过ctl.action=servername 的servername用ServiceManager::GetInstance().FindServiceByName(servername)找到对应的Service* 对象,然后根据action是 start stop restart 分别调用Service* 对应的函数)
PROP_PATH_* 的5个地方的 多个.prop 文件,这5个地方的多个属性文件主要分为3类。
1. PROP_PATH_RAMDISK_DEFAULT 在属性服务初始化的时候加载,
2. property_service_init_action() 打开属性服务,读取 PROP_PATH_SYSTEM_BUILD,PROP_PATH_SYSTEM_DEFAULT
3. 还有用户的 持久化属性PROP_PATH_LOCAL_OVERRIDE (可以通过 init.rc 中定义的 on property:vold.decrypt=trigger_load_persist_props load_persist_props 这个action来触发该类属性文件的读取)
Persist.* 需要持久化记录的,记录文件在PROP_PATH_LOCAL_OVERRIDE = /data/property/属性名, 例如: persist.sys.usb.config , persist.sys.timezone 时区设置
在init.rc 中的 on boot 里定义了setprop sys.usb.state $sys.usb.config 等
Init进程的set_init_properties_action() 中设置了一些 ro.* 的只读属性
system—properties属性服务的规则
只有1个写入者,多个读取者
Prop_area.count 永远不会减小值
一旦分配完成,prop_info 的name不会改变
一旦分配完成,prop_info 的offset不会改变
关于读取值相关的步骤:
关于写入值的步骤:
Property_set_impl()的实现
Selinux.reload_policy 等特殊的值不允许重复设置为1
__system_property_find(name) 找到 prop_info *的指针地址
get_prop_area_for_name(name)
list_find(prefixes,…)遍历匹配给定name的prefix_node 的指针,没有就返回null,然后访问context属性,然后访问pa方法获得 prop_area*,也就是在/dev/__propertes__/xxxx 中在tmpfs文件系统里映射到RAM的那块文件的内存地址。然后调用prop_area->find(name),内部实际上调用了find_property()
find_property() 从整个root_node() 的一个 trie(字典/二叉树混合结构)中查找属性,数据类型是prop_area,这个树的内存地址在data_,返回时被强制转换为 struct prop_bt*
如果已存在,那么用 __system_property_update() 更新值(本质是memcpy value 到 pi->value),否则用 __system_property_add() 添加新的
查找某个属性值的过程:key char *name -> __system_property_find(name) -> prop_info*
get_prop_area_for_name(name) -> prop_area.find(name)
list_find(prefixes,…) -> prefix_node -> prefix_node.context -> context_node.pa()
经历的数据结构变迁:
key == char -> prefix_node -> context_node -> prop_area -> prop_info -> prop_info.value == char == value
__system_property_add()
prop_area* get_prop_area_for_name() * ?
context_node::open()
map_prop_area()
如何新增的?
Init管理service
关于服务的状态有这几种情况
66#define SVC_DISABLED 0x01 /* do not autostart with class */
67#define SVC_ONESHOT 0x02 /* do not restart on exit */
68#define SVC_RUNNING 0x04 /* currently active */
69#define SVC_RESTARTING 0x08 /* waiting to restart */
70#define SVC_CONSOLE 0x10 /* requires console */
71#define SVC_CRITICAL 0x20 /* will reboot into recovery if keeps crashing */
72#define SVC_RESET 0x40 /* Use when stopping a process, but not disabling
73 so it can be restarted with its class */
74#define SVC_RC_DISABLED 0x80 /* Remember if the disabled flag was set in the rc script */
可以用位域组合
运行状态标记 SVC_RUNNING
这些状态flag 在 .rc 文件中 一个service可以通过对应的OPTION 来设置
服务所指定的program什么时候被调用?
等于是 service_start() 函数什么时候执行,服务什么时候被启动?
从状态常量中,看出有一些启动方式
服务执行的本质是init调用fork后子进程execv服务指定的可执行文件
一个服务启动前的准备工作:
子进程:
Calss 的类别主要定义有core,main。。。
Core 和 main主要是在 on boot时启动
Core有 ueventd,adbd,servicemanager等
Main有netd,zygote,bootanimation,installd,keystore等
Default一般用在recover上
其他的初始化
keychord_init
遍历每个service 调用 add_service_keycodes(),问每个服务是否有使用多点触摸的要求,有的话就把 svc->keychord 加入到 keychords 列表中
然后打开/dev/keychord 一次性写入 keychords 配置信息
Console本质是把 /dev/consle 的fd 作为fork后的service的 STDOUT(0) STDIN(1) STDERR(2)
接下来分析几个主要的服务
Servicemanager
Zygote
Zygote – System_server(和Servicemanager有什么关系)
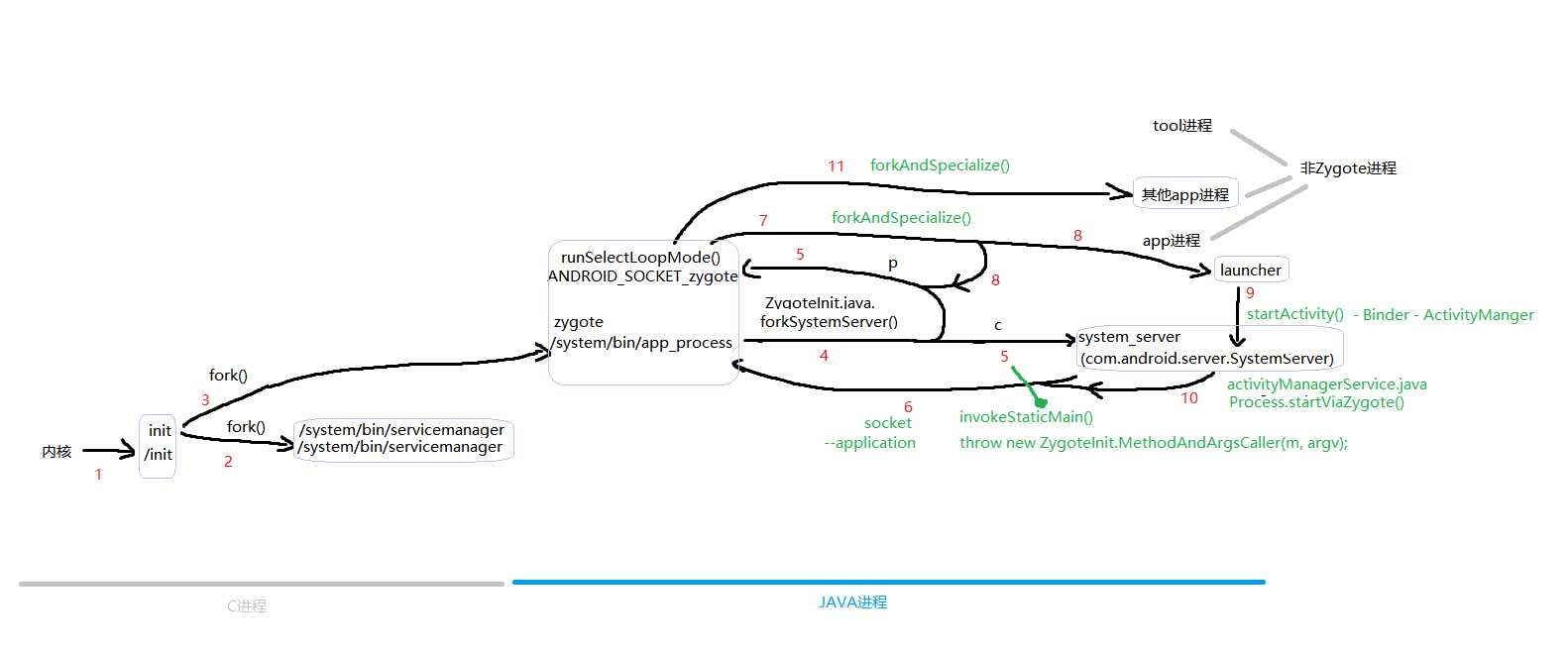
几个主要进程的启动顺序和角色 (还有主要函数)
看图:
标签:process recover important sel bootanim a* time top prope
原文地址:https://www.cnblogs.com/cyy12/p/12020166.html