标签:nbsp 继承性 获取 nts 两种 好处 bsp this max
一、基本概念:程序、进程、线程
测试Thread中的常用方法:
* 1. start():启动当前线程;调用当前线程的run()
* 2. run(): 通常需要重写Thread类中的此方法,将创建的线程要执行的操作声明在此方法中
* 3. currentThread():静态方法,返回执行当前代码的线程
* 4. getName():获取当前线程的名字
* 5. setName():设置当前线程的名字
* 6. yield():释放当前cpu的执行权
* 7. join():在线程a中调用线程b的join(),此时线程a就进入阻塞状态,直到线程b完全执行完以后,线程a才
* 结束阻塞状态。
* 8. stop():已过时。当执行此方法时,强制结束当前线程。
* 9. sleep(long millitime):让当前线程“睡眠”指定的millitime毫秒。在指定的millitime毫秒时间内,当前
* 线程是阻塞状态。
* 10. isAlive():判断当前线程是否存活
*
*
* 线程的优先级:
* 1.
* MAX_PRIORITY:10
* MIN _PRIORITY:1
* NORM_PRIORITY:5 -->默认优先级
* 2.如何获取和设置当前线程的优先级:
* getPriority():获取线程的优先级
* setPriority(int p):设置线程的优先级
*
* 说明:高优先级的线程要抢占低优先级线程cpu的执行权。但是只是从概率上讲,高优先级的线程高概率的情况下
* 被执行。并不意味着只有当高优先级的线程执行完以后,低优先级的线程才执行。
三、创建线程的方式
多线程的创建,方式一:继承于Thread类
* 1. 创建一个继承于Thread类的子类
* 2. 重写Thread类的run() --> 将此线程执行的操作声明在run()中
* 3. 创建Thread类的子类的对象
* 4. 通过此对象调用start()
创建多线程的方式二:实现Runnable接口
* 1. 创建一个实现了Runnable接口的类
* 2. 实现类去实现Runnable中的抽象方法:run()
* 3. 创建实现类的对象
* 4. 将此对象作为参数传递到Thread类的构造器中,创建Thread类的对象
* 5. 通过Thread类的对象调用start()
比较创建线程的两种方式。
* 开发中:优先选择:实现Runnable接口的方式
* 原因:1. 实现的方式没有类的单继承性的局限性
* 2. 实现的方式更适合来处理多个线程有共享数据的情况。
*
* 联系:public class Thread implements Runnable
* 相同点:两种方式都需要重写run(),将线程要执行的逻辑声明在run()中。
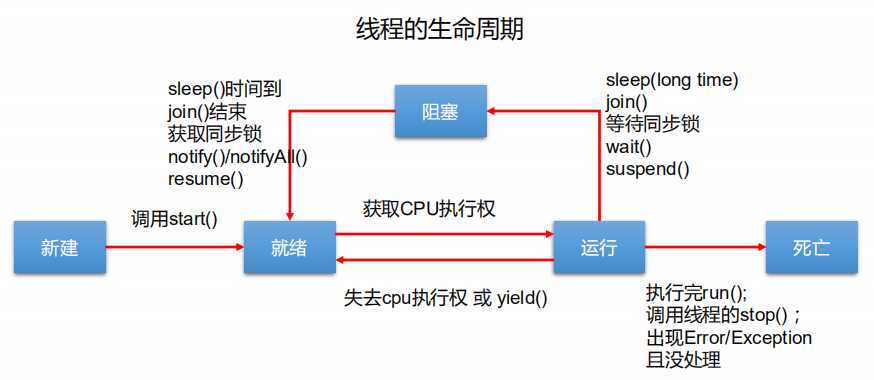
四、线程的生命周期
说明:1.操作共享数据的代码,即为需要被同步的代码。 -->不能包含代码多了,也不能包含代码少了。
* 2.共享数据:多个线程共同操作的变量。比如:ticket就是共享数据。
* 3.同步监视器,俗称:锁。任何一个类的对象,都可以充当锁。
* 要求:多个线程必须要共用同一把锁。
*
* 补充:在实现Runnable接口创建多线程的方式中,我们可以考虑使用this充当同步监视器。
* 在继承Thread类创建多线程的方式中,慎用this充当同步监视器,考虑使用当前类充当同步监视器。
关于同步方法的总结:
* 1. 同步方法仍然涉及到同步监视器,只是不需要我们显式的声明。
* 2. 非静态的同步方法,同步监视器是:this
* 静态的同步方法,同步监视器是:当前类本身
同步的方式,解决了线程的安全问题。---好处
操作同步代码时,只能有一个线程参与,其他线程等待。相当于是一个单线程的过程,效率低。 ---局限性
解决线程安全问题的方式三:Lock锁 --- JDK5.0新增
面试题:synchronized 与 Lock的异同?
* 相同:二者都可以解决线程安全问题
* 不同:synchronized机制在执行完相应的同步代码以后,自动的释放同步监视器
* Lock需要手动的启动同步(lock()),同时结束同步也需要手动的实现(unlock())
六、死锁问题
标签:nbsp 继承性 获取 nts 两种 好处 bsp this max
原文地址:https://www.cnblogs.com/xingqisan/p/12147075.html