标签:javascrip png 限制 通过 技术 情况 font 单片机 位置
前言:
前段时间在网上看到网友用单片机制作了一个写字机器人,我想了想应该不太难,于是就有了这个。
先上效果图:
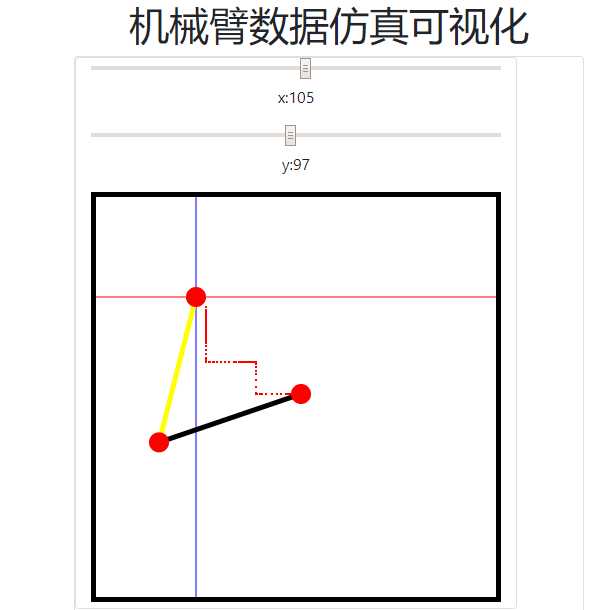
机械臂的运动空间:
如图所示,是一个平面的机械臂实现,以机械臂的原点建立笛卡尔直角坐标系,那么机械臂的末端执行机构的坐标就可以用下列两个方程组来表示:
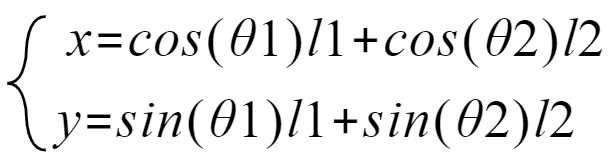
此方程可以实现通过电机的运转角度来得到末端执行机构的精确位置坐标 。
但在实际情况下这个方程组的运用场景十分有限。因为往往对于机械臂的角度没有太大的要求和限制其运动空间。
实际运用往往都是驱动步进电机的步进角度来实现控制机械臂的输出位移,利用这组公式就得通过映射的办法来查询,
所以我就把他求了个逆向解,将角度1和角度2显化,结果得到一对4次方程组,显化过程也比较复杂。下面是显化结果。
标签:javascrip png 限制 通过 技术 情况 font 单片机 位置
原文地址:https://www.cnblogs.com/ksxh/p/12150060.html